


Sold Out
オリエンタルモーター 2相ステッピングモーター(バイポーラ) C8413-9012K
商品コード
51162
商品の概要と仕様
バイポーラ式の2相ステッピングモータです。
電源電圧:DC17V 0.22A
抵抗:約74.8Ω
ステップ角:1.8°
シャフト径:Φ4.95mm(ローレット加工)
取付角寸法:42×42mm(取付穴寸法:31×31mm)
本体厚さ:約33mm(シャフトやインロー含めない)
比較的本体の厚さも抑えられたコンパクトなステッピングモータです。
Φ5シャフトにローレット加工が施されているため外径が細くなっており、内径Φ5のプーリー等をはめてみると若干緩さを感じます。
電源電圧:DC17V 0.22A
抵抗:約74.8Ω
ステップ角:1.8°
シャフト径:Φ4.95mm(ローレット加工)
取付角寸法:42×42mm(取付穴寸法:31×31mm)
本体厚さ:約33mm(シャフトやインロー含めない)
比較的本体の厚さも抑えられたコンパクトなステッピングモータです。
Φ5シャフトにローレット加工が施されているため外径が細くなっており、内径Φ5のプーリー等をはめてみると若干緩さを感じます。
商品の状態
モータを接続して正常に動作することを確認しました。
当社での動作確認は下記の3通りの方法で行いました。ご使用の際の参考にしてください。
-----------------------------------------
1.ArduinoのCNCシールド
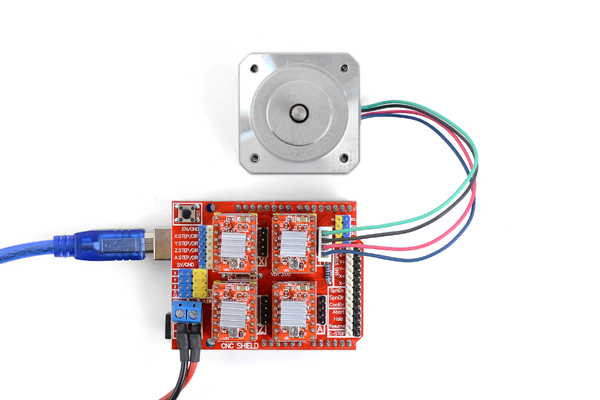
この例ではArduinoのCNCシールドを用いています。
低価格ながら複雑な制御ができることが魅力です。
実際に動作しているところの動画がこのページの下のほうでご覧になれます。
(写真では、当モーターのケーブルの先端についているコネクタをそのまま基板に挿入していますが、実際には規格が異なると思いますのでお勧めしません)
2.パルス変換IC(オリジナルマインド)
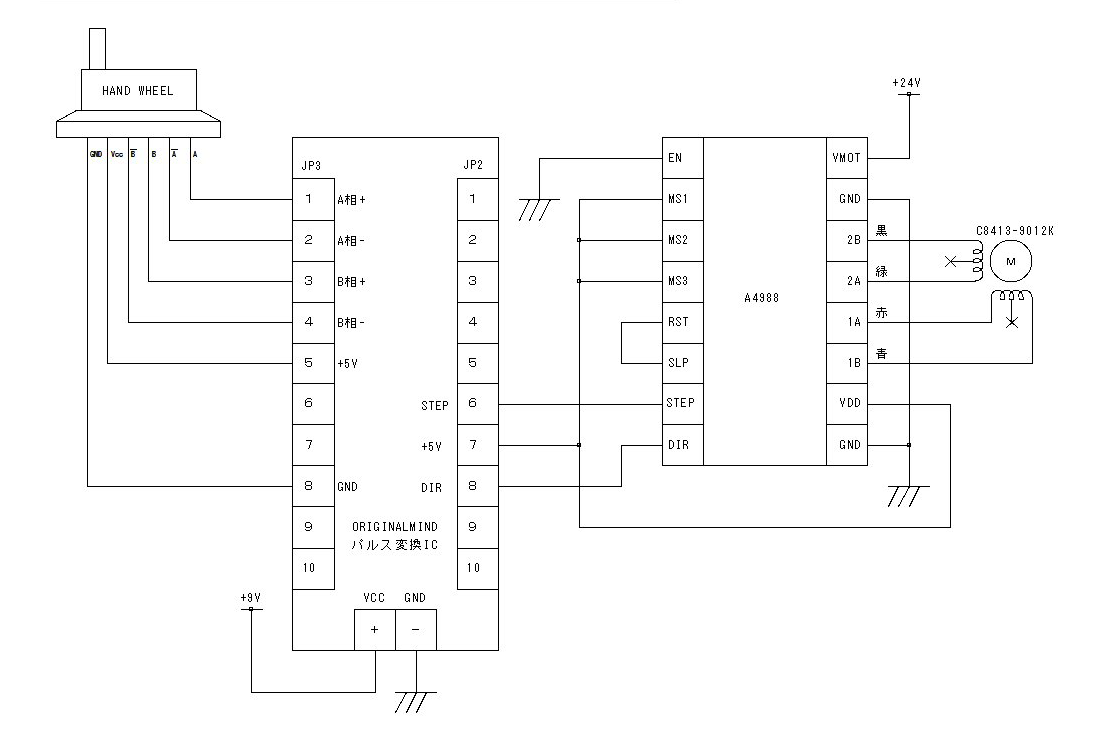
こちらの回路では、当社のパルス変換ICと、Pololu社のA4988ドライバモジュールを用いています。

Amazonで販売している手動パルサを回すと、それに連動してステージが動くようになっています。
顕微鏡画像をモニタで見ながらステージを微動させたい時などに便利です。
実際に動作しているところの動画がこのページの下のほうでご覧になれます。
3.信号発生器(Walfront)を使用
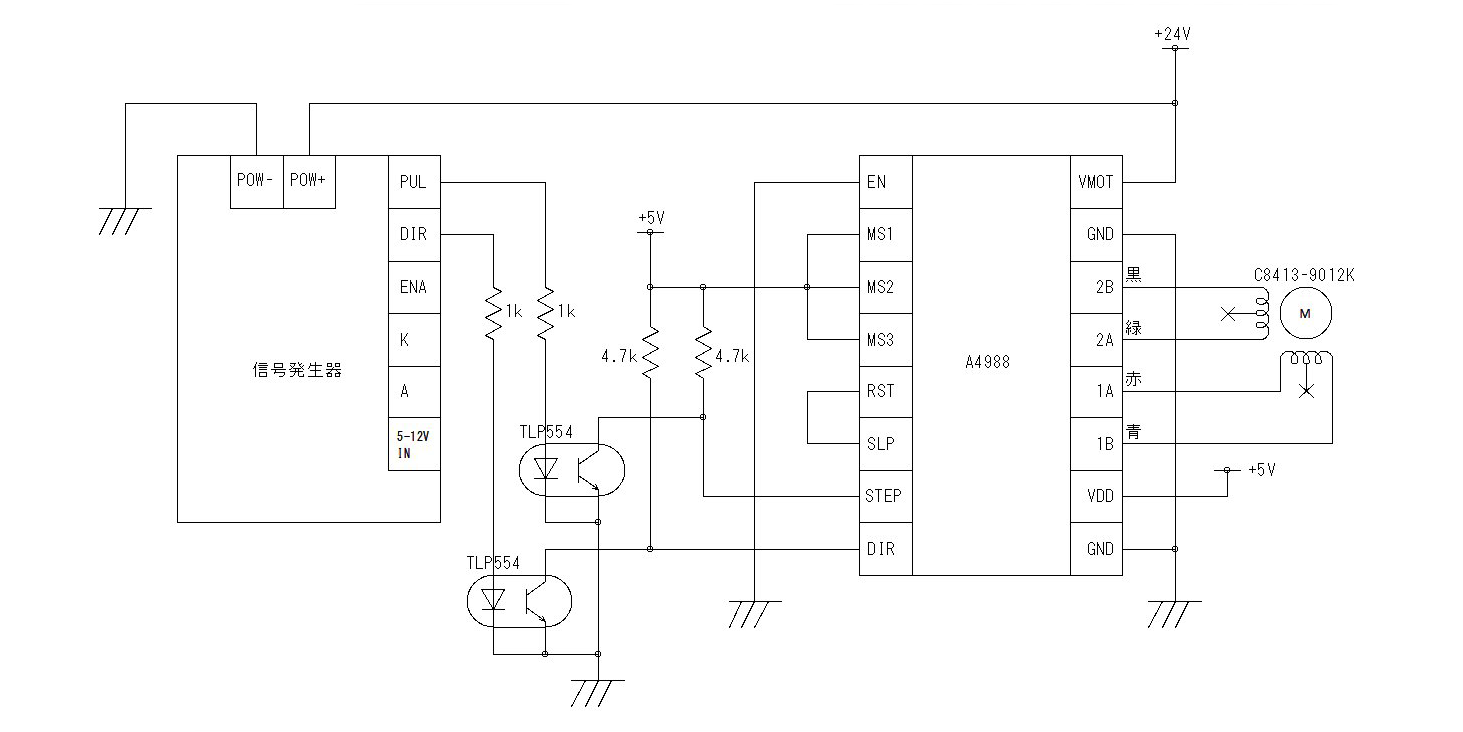
こちらの回路では、Amazonで販売している低価格な信号発生器と、Pololu社のA4988ドライバモジュールを用いています。
この信号発生器はステッピングモーターの駆動信号用として作られたもので、スイッチが2つあり、回転を止めたり回転方向を変えることができます。
回路図にあるフォトカプラ(TLP554)は、こちらより購入可能です。(汎用フォトカプラでは高い周波数になるとスイッチングが追い付かず正常動作しませんがTLP554なら大丈夫です。)
-----------------------------------------
上記の回路のすべてにおいて、当モーターの駆動に、A4988というICが搭載されたドライバモジュールを使っています。A4988は、マイクロステップに対応しており、コンパクトながら1コイルあたり最大2Aもの駆動が可能なドライバICです。
A4988には、モーターに電流が流れ過ぎないよう電流を制限する機能が搭載されています。
その電流値は、下記の写真のようにドライバ基板上のボリュームを回しながら、ボリュームとGND間の電圧(VREF)を調整することで設定します。
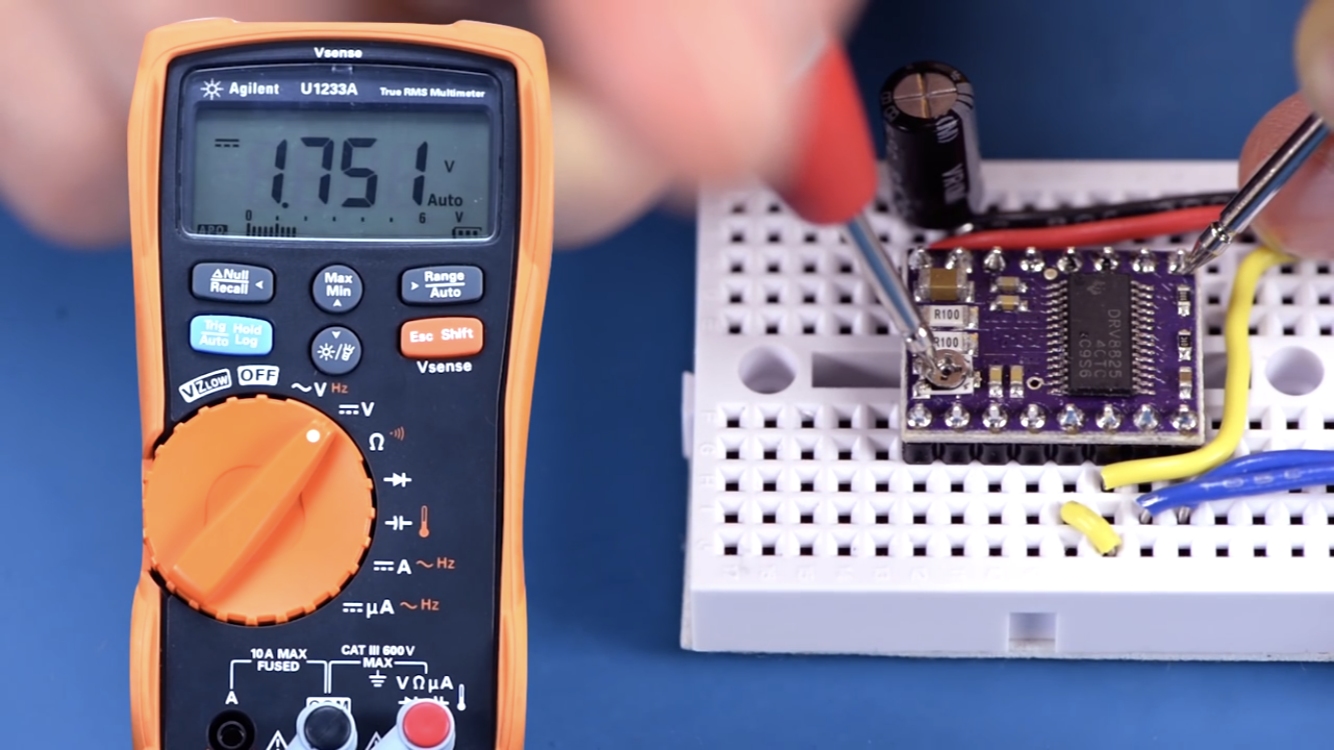
具体的に当モーターを駆動する場合、VREFが何Vになるかを説明します。
下記はVREFを算出するための計算式です。
VREF=8・Imax・Rcs
Imax(当モーターの定格電流)は0.22A、Rcs(基板についているセンスレジスタ)は0.068Ωなので、8×0.22A×0.068Ω=0.12Vとなります。
センスレジスタの抵抗値は製造時期によって異なるようです。詳細は下記のページをご確認ください。
https://www.pololu.com/product/1182
ArduinoのCNCシールドのドライバモジュールにもA4988が搭載されているのですが、こちらは計算式が上記とは異なります。メーカーのページによりますと下記の計算式となっています。
Imax=Vref/0.4
この計算式にあてめるとVREFが0.088Vとなるため、実際にそのように調整したのですが、なぜかPololu社のA4988ドライバモジュール(動作確認例1、2)と同等のトルクが出ませんでした。
同等のトルクにするには、0.5Vぐらいまで上げなければなりませんでした。
原因はわかりませんでしたが、もしこのCNCシールドをご利用になる場合は、運転しながら調整を繰り返していただくことをお勧めします。
ドライバなどの付属品はありません。
キズや汚れがあります。
モータから出ている電線には傷みがありますが、根元から5センチ以内に傷みが無いことを確認していますので延長には支障ありません。
当社での動作確認は下記の3通りの方法で行いました。ご使用の際の参考にしてください。
-----------------------------------------
1.ArduinoのCNCシールド
この例ではArduinoのCNCシールドを用いています。
低価格ながら複雑な制御ができることが魅力です。
実際に動作しているところの動画がこのページの下のほうでご覧になれます。
(写真では、当モーターのケーブルの先端についているコネクタをそのまま基板に挿入していますが、実際には規格が異なると思いますのでお勧めしません)
2.パルス変換IC(オリジナルマインド)
こちらの回路では、当社のパルス変換ICと、Pololu社のA4988ドライバモジュールを用いています。
Amazonで販売している手動パルサを回すと、それに連動してステージが動くようになっています。
顕微鏡画像をモニタで見ながらステージを微動させたい時などに便利です。
実際に動作しているところの動画がこのページの下のほうでご覧になれます。
3.信号発生器(Walfront)を使用
こちらの回路では、Amazonで販売している低価格な信号発生器と、Pololu社のA4988ドライバモジュールを用いています。
この信号発生器はステッピングモーターの駆動信号用として作られたもので、スイッチが2つあり、回転を止めたり回転方向を変えることができます。
回路図にあるフォトカプラ(TLP554)は、こちらより購入可能です。(汎用フォトカプラでは高い周波数になるとスイッチングが追い付かず正常動作しませんがTLP554なら大丈夫です。)
-----------------------------------------
上記の回路のすべてにおいて、当モーターの駆動に、A4988というICが搭載されたドライバモジュールを使っています。A4988は、マイクロステップに対応しており、コンパクトながら1コイルあたり最大2Aもの駆動が可能なドライバICです。
A4988には、モーターに電流が流れ過ぎないよう電流を制限する機能が搭載されています。
その電流値は、下記の写真のようにドライバ基板上のボリュームを回しながら、ボリュームとGND間の電圧(VREF)を調整することで設定します。
具体的に当モーターを駆動する場合、VREFが何Vになるかを説明します。
下記はVREFを算出するための計算式です。
VREF=8・Imax・Rcs
Imax(当モーターの定格電流)は0.22A、Rcs(基板についているセンスレジスタ)は0.068Ωなので、8×0.22A×0.068Ω=0.12Vとなります。
センスレジスタの抵抗値は製造時期によって異なるようです。詳細は下記のページをご確認ください。
https://www.pololu.com/product/1182
ArduinoのCNCシールドのドライバモジュールにもA4988が搭載されているのですが、こちらは計算式が上記とは異なります。メーカーのページによりますと下記の計算式となっています。
Imax=Vref/0.4
この計算式にあてめるとVREFが0.088Vとなるため、実際にそのように調整したのですが、なぜかPololu社のA4988ドライバモジュール(動作確認例1、2)と同等のトルクが出ませんでした。
同等のトルクにするには、0.5Vぐらいまで上げなければなりませんでした。
原因はわかりませんでしたが、もしこのCNCシールドをご利用になる場合は、運転しながら調整を繰り返していただくことをお勧めします。
ドライバなどの付属品はありません。
キズや汚れがあります。
モータから出ている電線には傷みがありますが、根元から5センチ以内に傷みが無いことを確認していますので延長には支障ありません。
在庫数
売り切れ