'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
Land Crawler eXtreme / Land Crawler eXXtreme
ものづくり文化展2011 大賞受賞作品
選定者のコメント:
これほどメカの魅力が感じられる作品は、なかなかないのではないでしょうか。
外観の美しさだけではなく、テオヤンセン機構を用いた美しい動きも魅力的な作品です。
製作者の情報
| 製作者 | : | VagabondWorks様 |
| Webページ | : | VagabondWorks |
使用している製品・部品
製作者のコメント
テオ・ヤンセン機構を用いた乗用玩具です。
ハンドル無しのセグウェイ型の Land Crawler eXtreme 12脚
スケボー型のLand Crawler eXXtreme 24脚
の2タイプを作成しました。
Land Crawler eXtreme
テオ・ヤンセン機構採用 12脚乗用玩具
- 重量:約12.4kg
- 全長:250mm
- 全幅:334mm
- 全高:237mm
- 耐荷重:360kg
- 可動重量:90kg以上
- 最大出力:90W
- 電源:7.2V ニッケル水素電池 5000mAh
- 動作時間:75kg負荷にて45分、無負荷にて3時間程度
- 主な材質:ステンレス、機械構造炭素鋼、ポリカーボネート
- 操縦方式:重心移動/有線リモコン
- 制御仕様:電流制御(25kHz)、速度制御(100Hz)
- センサ:
非接触式重心荷重検出センサ×4
非接触式騎乗検出センサ×2
回転検出センサ×2
電流検出センサ×2 - その他:
1.4インチ液晶ディスプレイ(128×128pixel)
ジョグスイッチ(L/R/Select)
モノラルスピーカー
uSDカードスロット(キャリブレーション値保存用)
アナログジョイスティック接続IF(リモコン操縦時)
Land Crawler eXXtreme (land crawler double extreme)
テオ・ヤンセン機構採用 乗用24脚電動スケートボード
- 重量:約14kg
- 全長:538mm
- 全幅:274mm
- 全高:164mm
- 耐荷重:300kg(設計値)
- 稼働重量:90kg以上
- 駆動装置:コアレスブラシモーター 90W×2
- 瞬間最大出力:1kW
- 電源:リチウムフェライト電池(5S1P) 16.5V 4200mAh
- 動作時間:TBD
- 主な材質:ステンレス、機械構造炭素鋼、ポリカーボネート
- 操縦方式:
Android端末の専用アプリケーション
LCXX DriverからBluetooth接続(SPP) - 通信方式:
Bluetooth ver2.1+EDR (SPP)
2.4GHz(2400~2483.5MHz)
最大100m ※技適対応、電波法に適合したドングルを使用
- 制御方式:電流制御(24kHz)、速度制御(100Hz)
- センサ:
高分解能ロータリーエンコーダー×2
モーター電流センサ×2
モーター温度監視温度センサ×2
バッテリ電圧監視センサ×1 - その他:フルカラーステータスLEDバー(天面右側)
写真
 |
LCXの全景 |
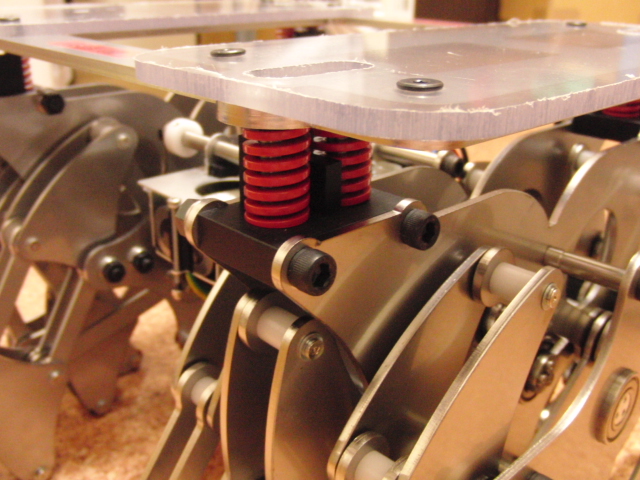 |
LCXのバネ変位を用いた荷重検出部 |
 |
LCXの脚構造 |
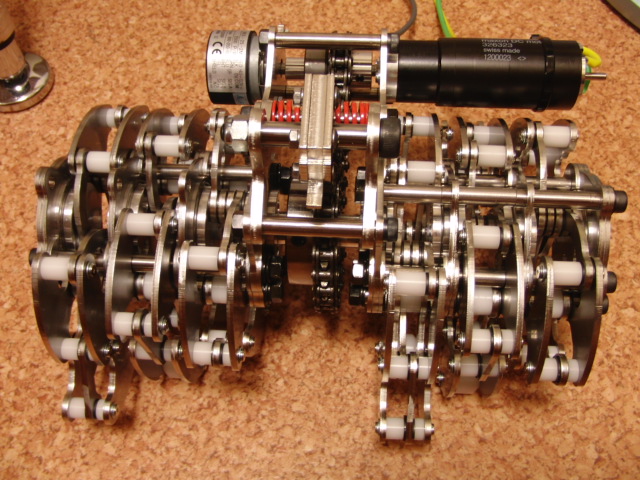
 |
LCXXの全景 |
 |
LCXXの脚構造 |
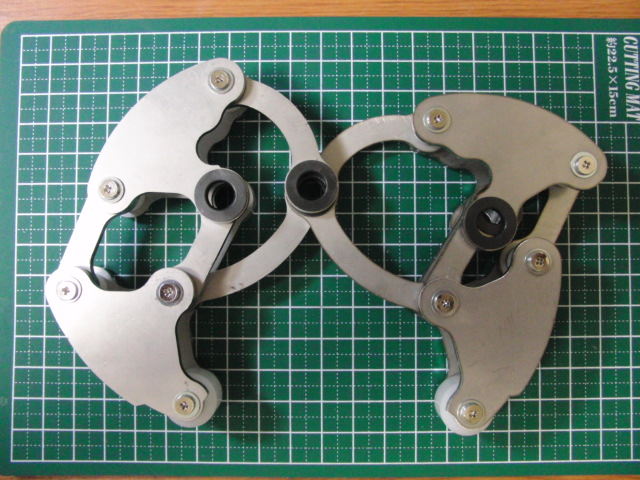
 |
LCXXの脚部ユニット12脚 これが前後2つで24脚になる |
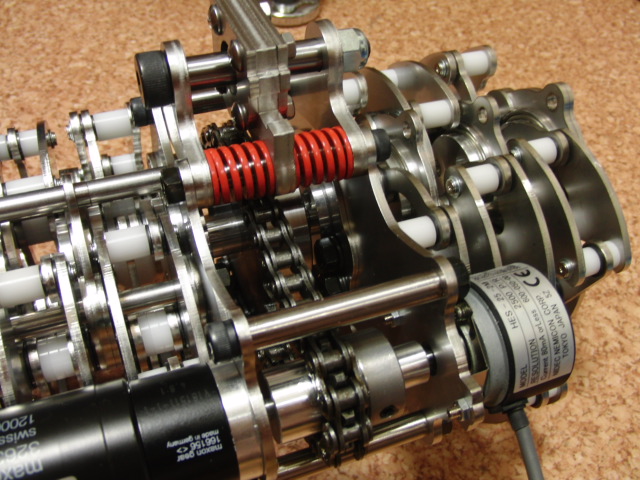 |
スケボーの天板のロール運動を前後の脚ユニットの逆位相ステアリング運動に変換するメカ機構 |