'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
MINITAN-Z
製作者の情報
| 製作者 | : | 秋津 浩紀様 |
| Webページ | : | ひらめき☆ときめきサイエンス |
| : | 土居研究室ホームページ |
使用している製品・部品
製作者のコメント
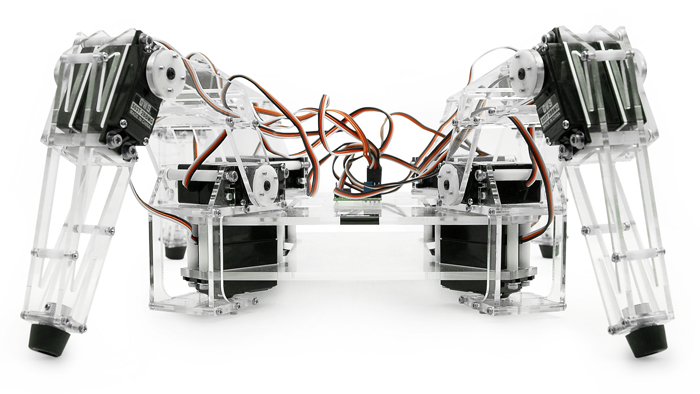
この4足歩行ロボットは研究の一環で作成したものです。中学生、高校生向けの「ひらめき☆ときめきサイエンス」という講習会で実際に使用しました。
このロボットの目的として「4足歩行ロボットの動作や機構について学べる」なので、なるべくロボットに使用している素材に、透明なアクリル材を使用しました。
透明なアクリル材を使用しロボット歩行時の重心位置が分かるので、歩行動作の作成においても役立ちます。
講習会のために同ロボットモデルと1本足モデルを5台づつ作成したため、CNCがとても役に立ちました。
製作において苦労した点も多かったですが、とてもよい経験になったと思います。
写真
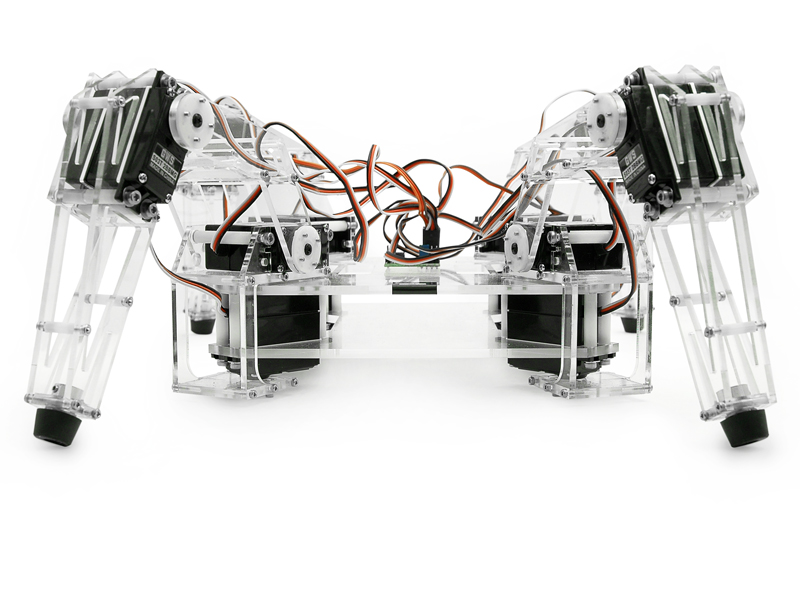 |
機体にはアクリル材を使用し、分かりやすいシンプルな機構を目指しました。 | 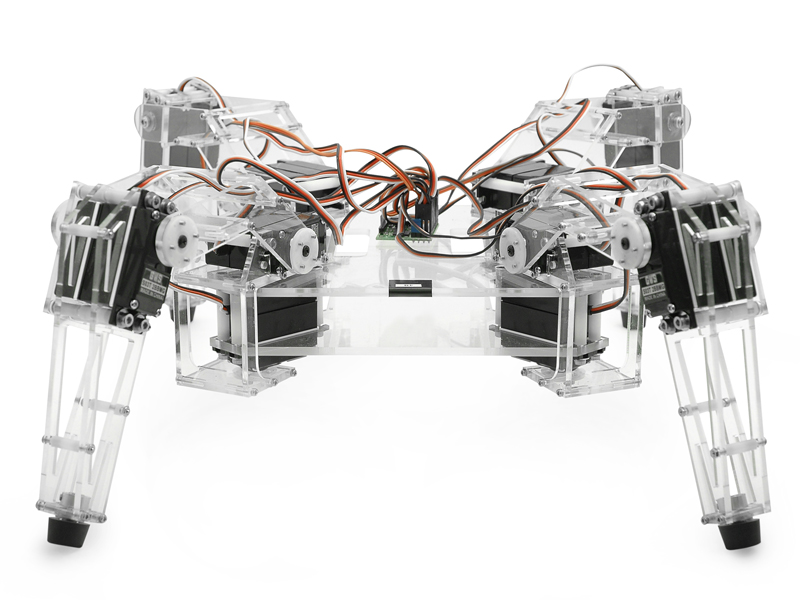 |
中央のサーボコントローラで12個のサーボモータを制御しています。 |
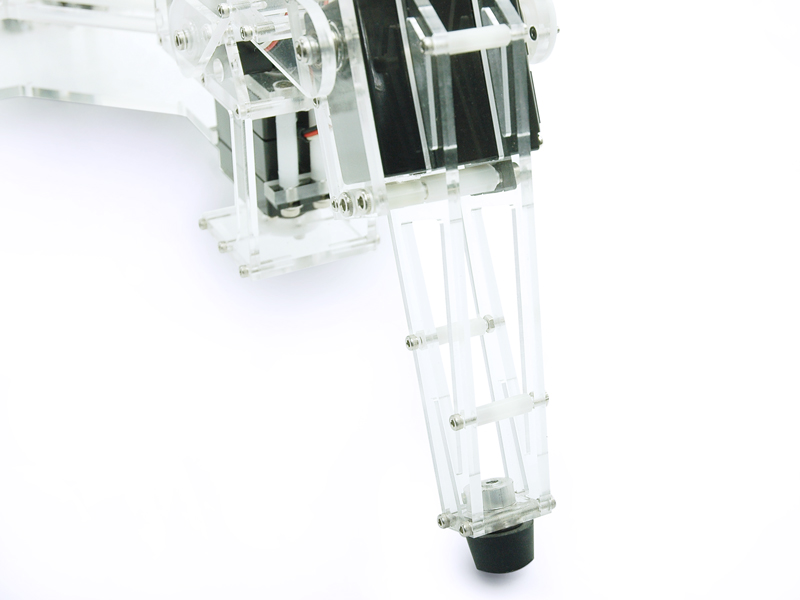 |
足先はフリーに回転し、歩行動作時の抵抗を減らします。 |
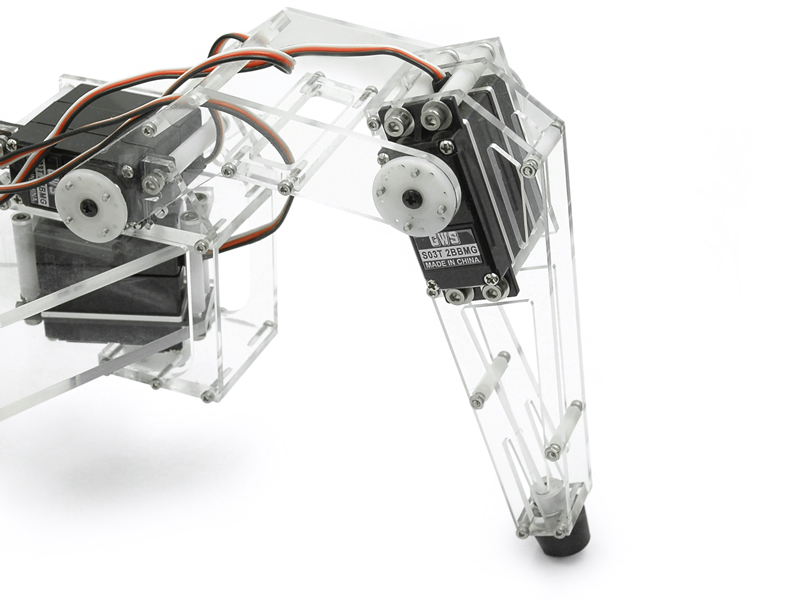 |
脚機構には3つのサーボモータを使用していいます。 |
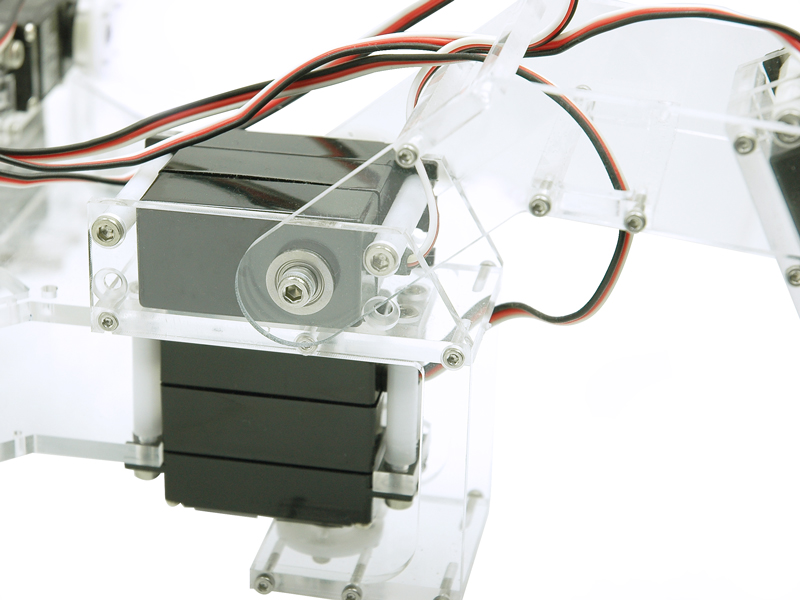 |
各サーボモータの関節部にはベアリングを使用し、足先位置の高精度を目指しました。 |
動画
動作中のロボットの様子