'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
Legged Raspberry Pi
製作者の情報
| 製作者 | : | 井町 智彦様 |
使用している製品・部品
製作者のコメント
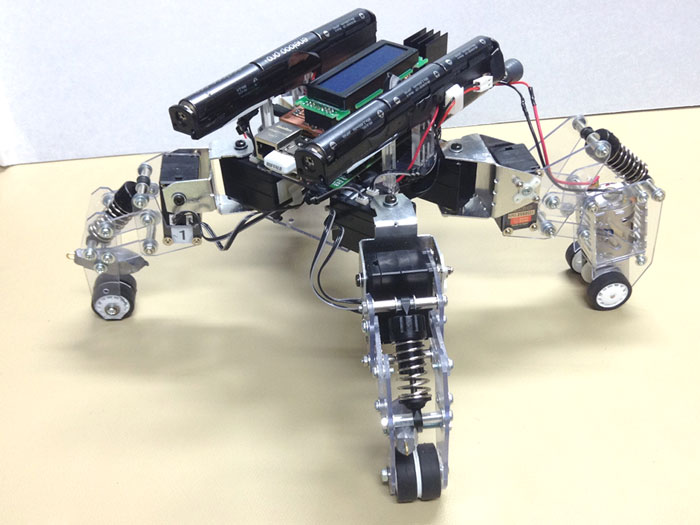
超小型マイコンボード Raspberry Pi に脚を付けてみました。
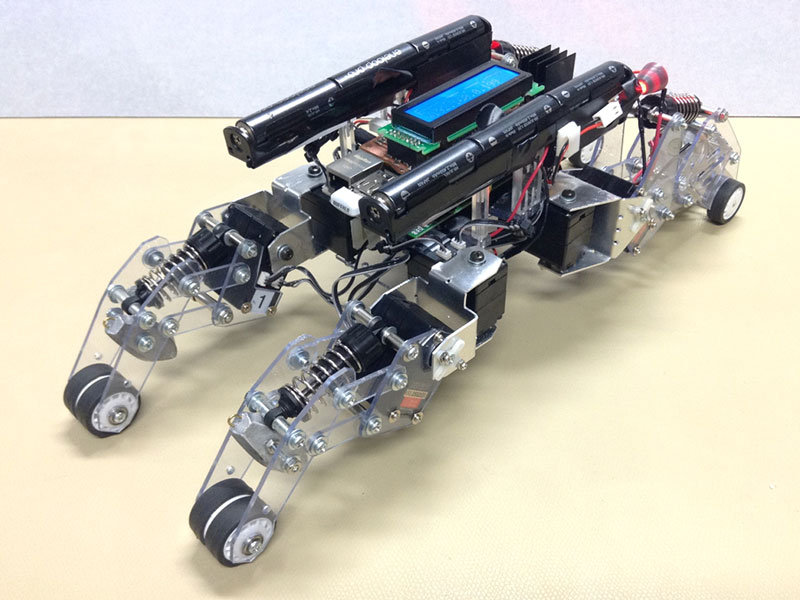
後脚にはモーターを装備し、歩行モード・走行モードに変形できます。
こう見えても Linux マシンなので、通信手段は WiFi です。
SSH でリモートログインして操作します。
キーボードによるリアルタイム操作の他、スクリプトを書いて自動動作させることもできます。
パーツは全て、mini-CNC BLACK II でアクリル板やアルミ板から切り出しました。
写真
 |
走行モード(フロントビュー) | 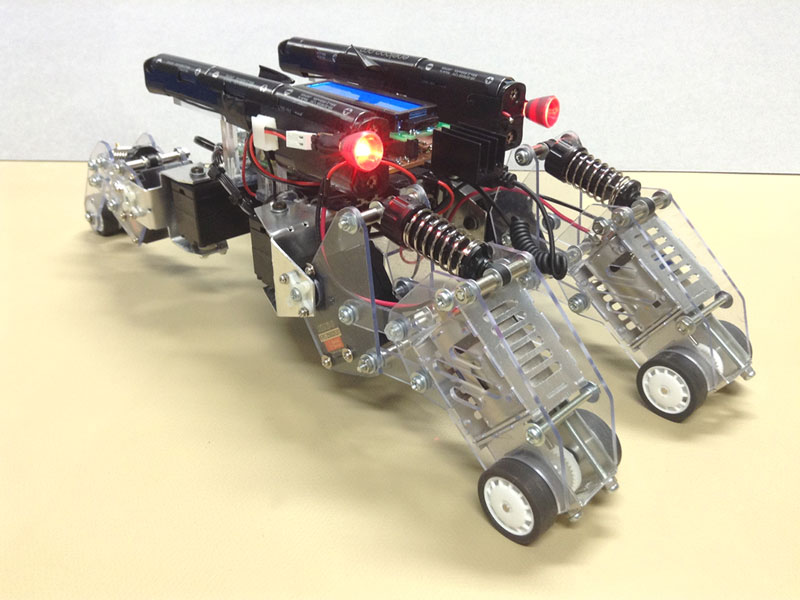 |
走行モード(リアビュー) |
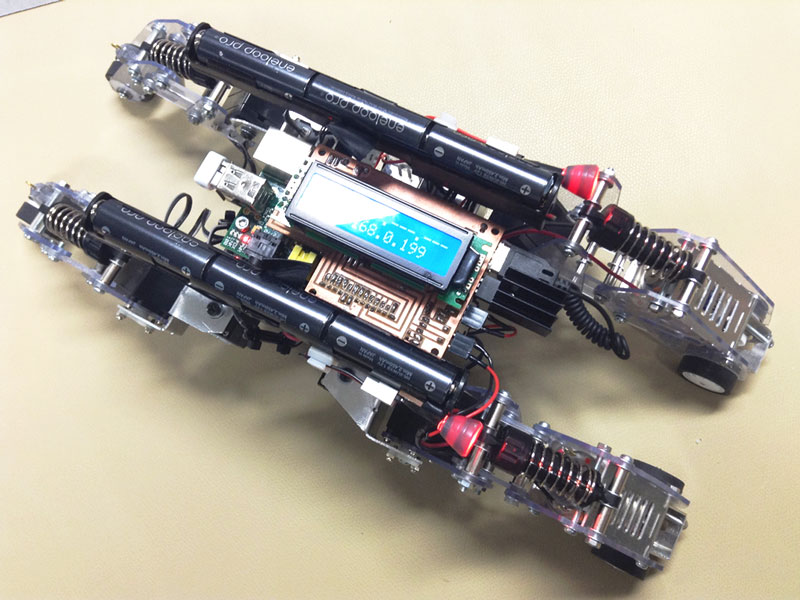 |
走行モード(トップビュー) |
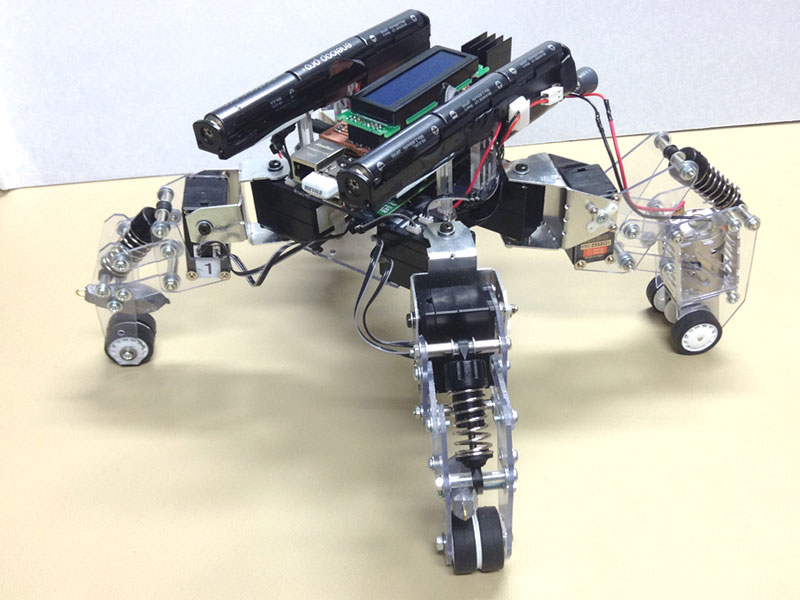 |
歩行モード(フロントビュー) |
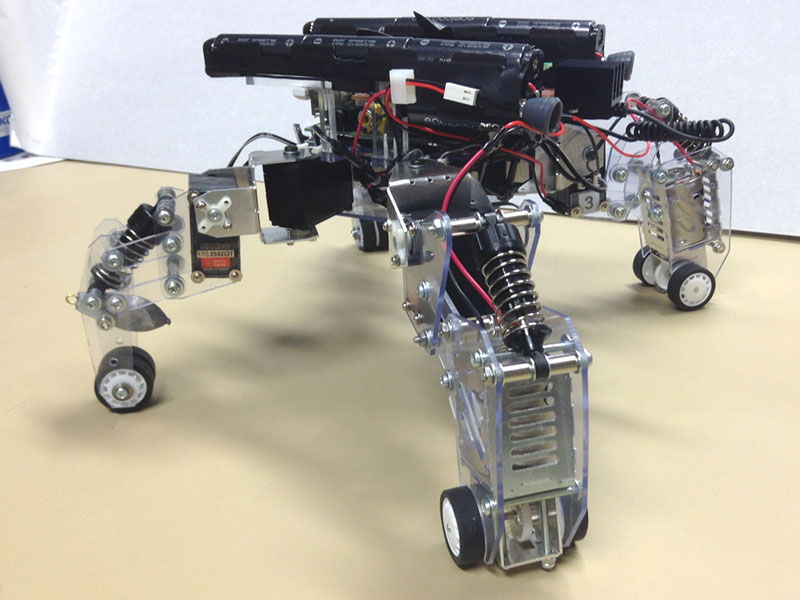 |
歩行モード(リアビュー) |
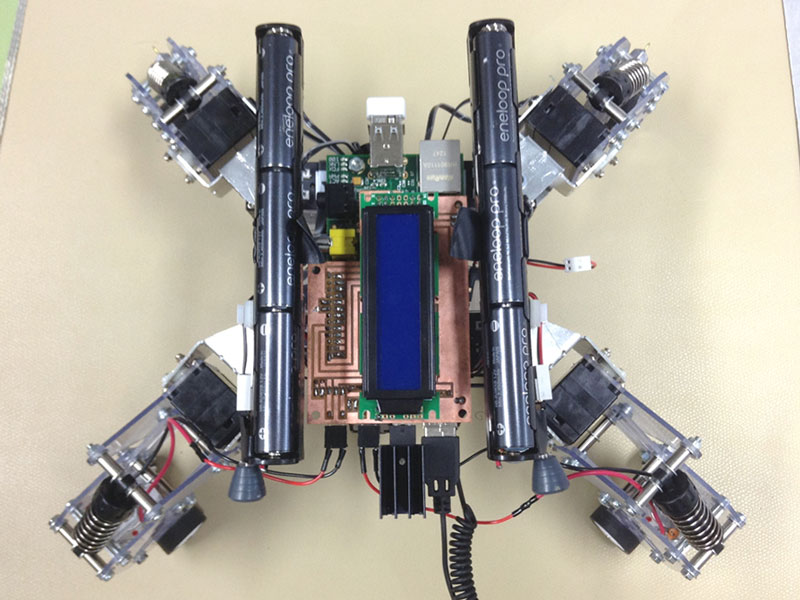 |
歩行モード(トップビュー) |
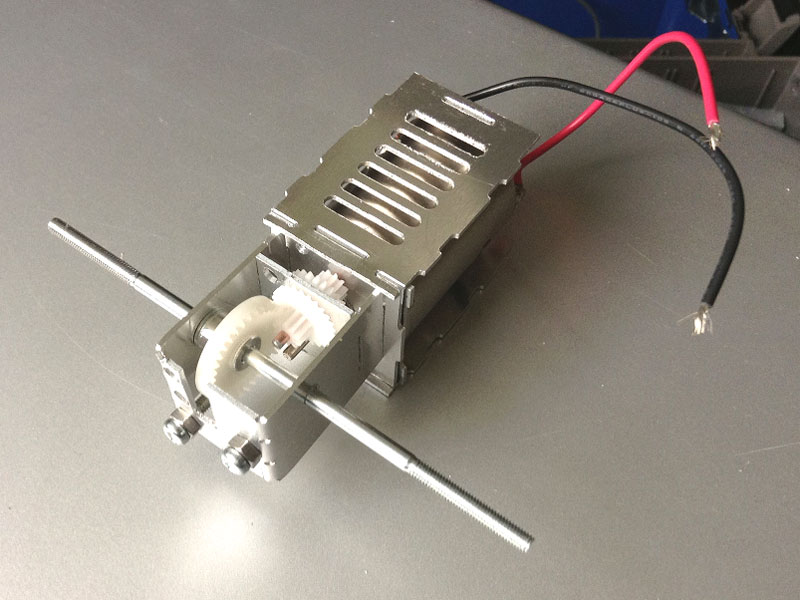 |
後脚モータのハウジングとギアボックス |
動画
Legged Raspberry Pi (ニコニコ動画)
Make Robot Legged Raspberry Pi (You Tube)