こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
製作者の情報
| 製作者 | : | 松田 啓明様 |
| : | 林 直宏様 | |
| Webページ | : | 所属研究室Webページ:知能システム学講座 |
| : | VENUS ROBOTIX | |
| : | 金星☆ちゃんねる | |
| : | VENUS CHANNEL |
使用している製品・部品
製作者のコメント
ロボット教育の教材として作成した射的ロボットを作成しました。
この射的ロボットとKinectのような外界センサを組み合わせて、自動で的を射ることができます。
今回は射的ロボットのハードウェアの部分を紹介させていただきます。

部品
- 東京マルイ
- 電動ガン グロック18C 1個
- グロック18C用アタッチメントマウントレイル 1個
- 減速アダプター 1個
- 双葉電子工業
- コマンド式サーボ RS405CB 3個
- 電源スイッチ付きハブ TB-RV71EH-7.4V/4W 1個
特徴
グロック18Cをサーボモータで外部から操作することで、ロボット化しています。
PitchとYaw方向に自由に動き、引き金を引くことができます。
今回はグロック18Cが本来持つ安全性を損なうことがないように、グロック18Cには一切手をいれることなくロボット化するというルールを設けて作成しました。
そのため、グロック18Cにマウントレイルを装着し、そのレールを用いてグロック18Cにサーボモータを着けロボット化しています。
また、室内でも安全に運用できるよう減速アダプターを装着しています。
製作工程
主に、グロック18Cとサーボモータを接続するためのアルミフレームの工作を行いました。
KitMillを使用してフレームを切削し、その後いくつかのパーツはフライス盤で追加工を行っています。
トリガを引くための棒や、フレームを支えている支柱は、旋盤で削りだしました。
最後に、全てのパーツに彩を使用してアルマイトを施せば完成です。
前年ではボールスクリューとコレットチャックを使用していなかったのですが、本年よりこれらのオプションを導入しました。
特にコレットチャックを導入したおかげで、工具交換時に気を使わずに済み、精度が上がったように思います。
苦労した点
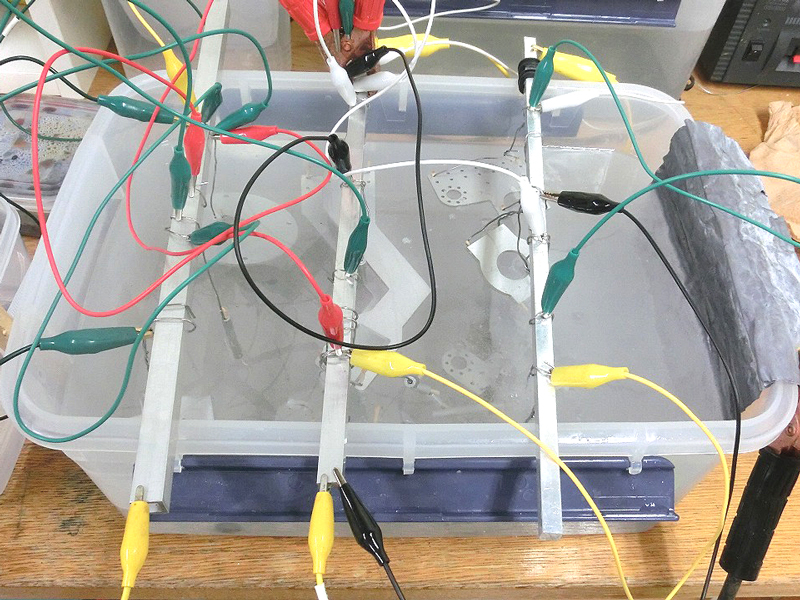
いつも作成するロボットよりもパーツ1つ1つが長く・大きいためアルマイトの工程で苦労しました。
安定して電力を供給するため、1つ1つのパーツにクリップで配線しました。
また、均一に色付けするために、電圧・電流や液温など色々工夫して何とか満足のいく色付けが出来ました。
グロック18Cの黒いフレームと、アルマイトしたフレームの色合いがマッチし、落ち着きのある見た目にできました。
比較のためにアルマイト前に仮組みした写真も掲載していますので、見比べてみてください。
写真
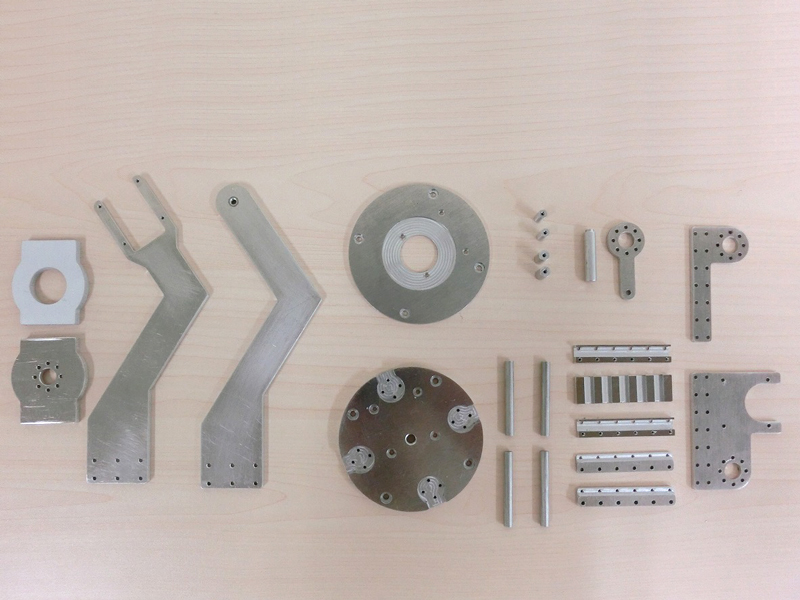 |
切削したフレーム |  |
アルマイト前の仮組み1 |
 |
アルマイト前の仮組み2 |
 |
アルマイト中のフレーム |
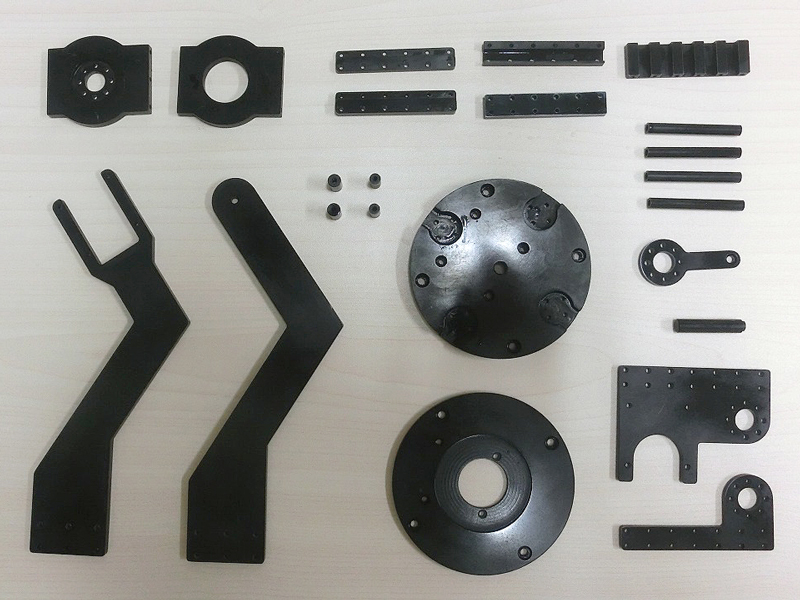 |
アルマイトしたフレーム |
 |
外観(横) |
 |
外観(斜め後) |
 |
外観(斜め前) |
 |
引き金 |
動画
動作確認の様子