'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
ヘリコプター型ライントレースロボット
製作者の情報
| 製作者 | : | 山口 辰久様 |
| Webページ | : | 山口自動機械 |
使用している製品・部品
製作者のコメント
ロボトレース競技にヘリコプター型ロボットが出場したら面白いのではないかと考えて制作しました。
現在のところまだ飛行の制御は実現していませんが、その前の段階として地面を滑走しながらローター反力を利用してのライントレースができました。
重量の制約からセンサー部分とマイコン周りの電子回路を一体化して作る必要があり、プリント基板を複雑な形状にカットする必要がありました。その加工のためにKitMillを使用しました。
KiCADで作成したプリント基板の外形をDXFファイルに出力、鍋CADフリー版で修正した上でCut2Dで出力しました。
また、基板を取り付けるための特殊な形状のスペーサーも加工しました。

写真
|
ロボット外観。 |  |
加工前のプリント基板。0.4mmのガラスエポキシ製。パターンはエッチングで作成し、外形をKitMillで切削。 |
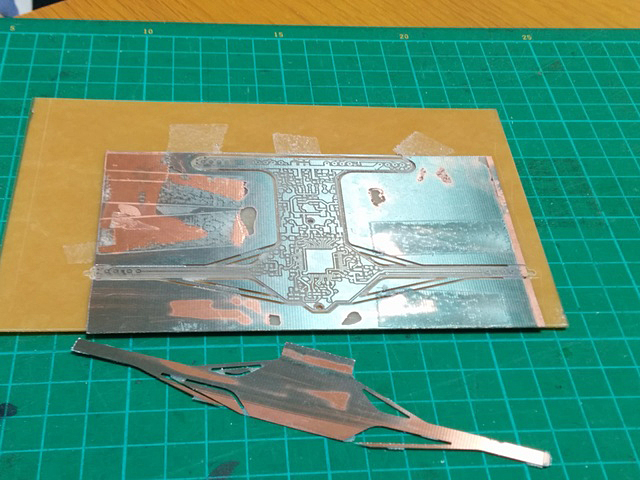 |
加工完了した基板。下は加工手順確認のために使用した端材。 |
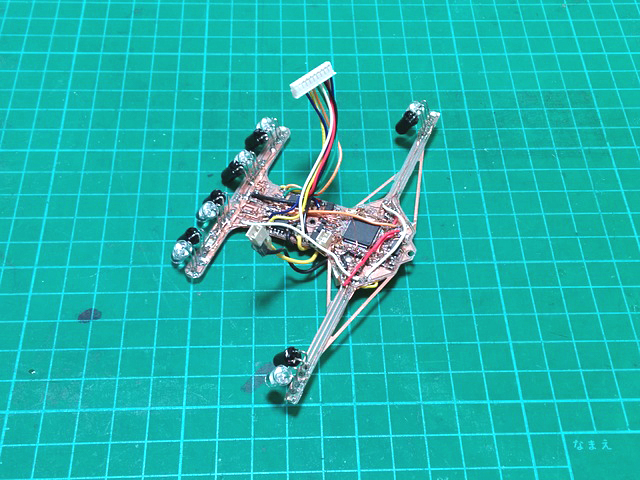 |
部品を取り付け、完成した基板。 |
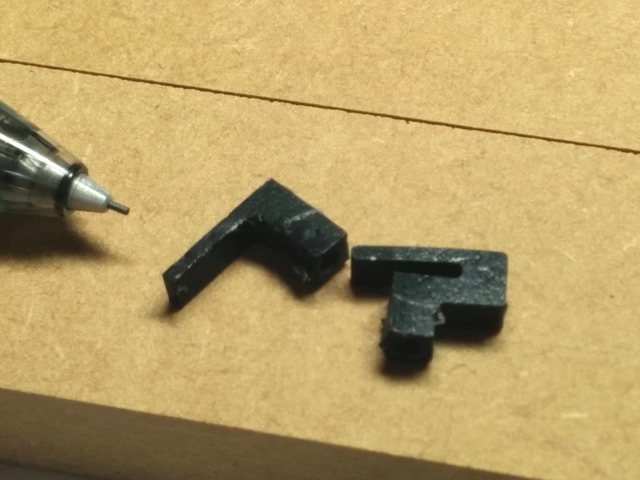 |
基板を取り付けるためのスペーサー。3mmの発泡塩ビ板から切り出した。 |
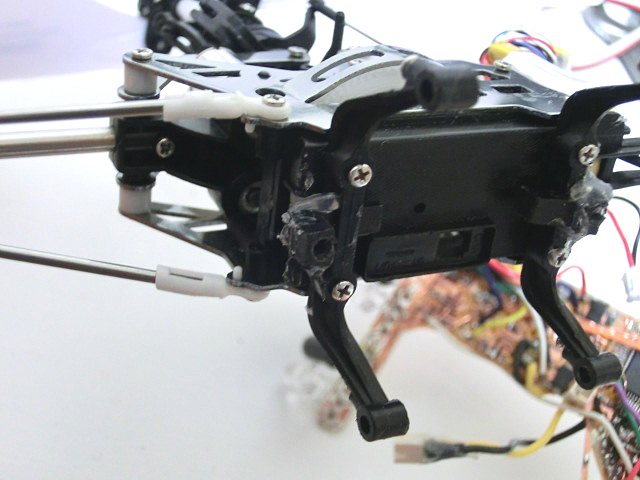 |
機体下面にスペーサーを取り付けたところ。 |
動画
動作確認の様子です。地面を滑走しながらコースの白線をたどります