こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
製作者の情報
| 製作者 | : | 松田 啓明様 / 二瓶 陽介様 / 田附 雄一様 |
| Webページ | : | 知能システム学講座 |
| くまさんロボットのソフトウェアの説明 | : | 楽器演奏のためのMIDI RTコンポーネント |
使用している製品・部品
製作者のコメント

<写真1 Bear Ring>
くまさんロボット達がハンドベルを演奏する写真1のようなロボットシステムを作成しました。
くまさんロボットは10体あり、全部で20音のハンドベルを演奏することができます。
ハンドベルを鳴らすためのハードウェアについて紹介させていただきます。
ソフトウェアについてご興味があればこちらをご覧ください。
▶ 部品
使用した主な部品は以下のようになっています。
・双葉電子工業
コマンド式サーボ RS301CR 20個
電源スイッチ付きハブ TB-RV71EH-7.4V/4W 1個
USB-RS485変換器: RSC-U485 1個。
▶ 演奏ユニット
ハンドベルを演奏する機構を作る上での課題は、以下のようになります。
- アクチュエータの数を増やすほど高価になるので、個数を出来る限り少なくする。
- 音楽を演奏しても壊れない、堅牢でメンテンナンスしやすい機構が必要である。
- 外装をつけたときに、演奏機構が目立たず違和感のない見た目である必要がある。

<写真2 RingUnit>
これらの課題を解決するように、写真2のような演奏ユニット作成しました。
アルミ板をKitMillで削りだし、彩で黒アルマイトを施しています。
1つのホビーサーボで人のようにハンドベルを振ることで演奏するこができます。
ご覧のように、非常に単純な構造でメンテナンスも容易です。
また、RS301CRが優秀であるのと、構造のシンプルさから何曲演奏しても壊れない堅牢なユニットに仕上がりました。
うまくアルマイトすることができ、遠目からでは目立ちにくいユニットになりました。
▶ くまさんロボット
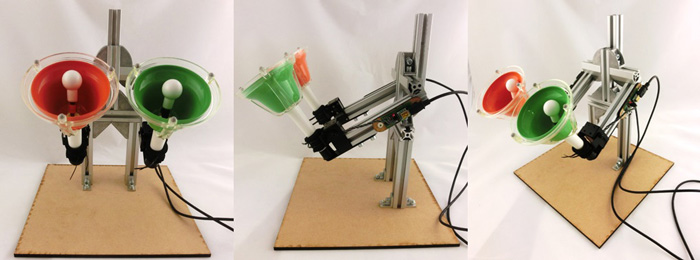
<写真3 くまさんロボットの骨格>

<写真4 くまさんロボット>
演奏ユニットをミスミ製のアルミフレーム2020に取り付けることで、写真3のような骨格を構成しています。
この骨格にくまさんのぬいぐるみを加工した外装をかぶせることで、写真4のようなかわいいくまさんロボットが出来上がります。
先ほど説明した演奏ユニットを手先に固定することで、人と同じようにハンドベルを振れます。
また、外部に露出する演奏ユニットは目立ちにくく最小限であるので、くまさんの外見の可愛さを損なっていません。
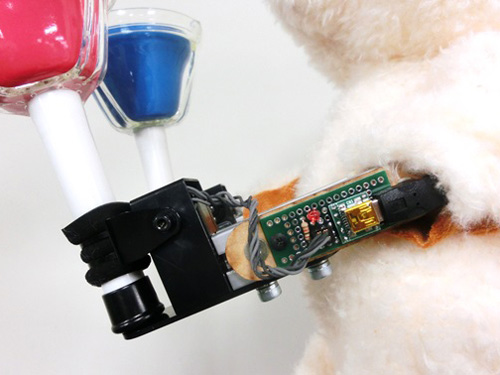
<写真5 中継基板>
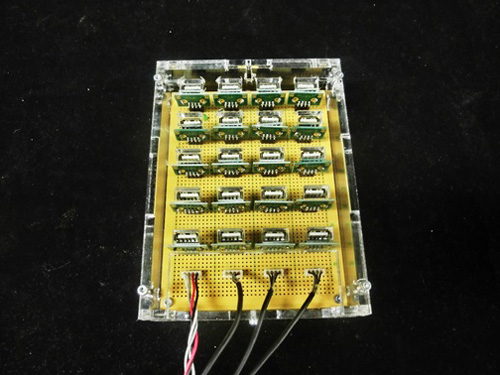
<写真6 メインハブ>
各ホビーサーボは写真5のような中継基板を通して写真6のメインハブに接続されています。
この中継基板は電源を接続すると赤く発光するので、ひと目で接続状態を確認できます。
また、メインハブと中継基板はRS485の信号ですが、安価で安定したケーブルとしてUSBケーブルを使用しています。
このように、演奏前に簡単に状態を確認できるようにすることで、本番に失敗しないよう注意を払っています。
▶ 土台
このロボットはデモのために巡業することを前提としており、以下のような制約を設けています。
- 大人3人で容易に持ち運ぶことができる。
- 輸送による衝撃で壊れない丈夫さが必要である。
- デモ会場ですぐに準備を行えるよう組み立てが簡単である。
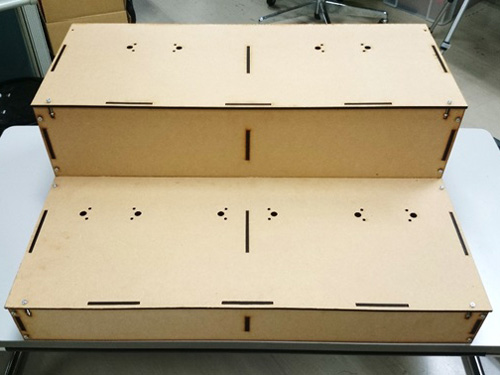
<写真7 ステージ>

<写真8 荷物>
これらの課題を解決するために、写真7のようなステージ(写真は未塗装)を作成しました。
レーザーカッターで切り抜いたMDF板をボルトで結合して箱組することで、ステージを作成しています。
このステージ自体が箱と蓋になっており、くまさんロボットを格納することができます。
全部を格納すると、制御用のPCや予備の部品を全てあわせて写真8のようにスーツケース3つ分に収めることができます。
これにより、大人3人で電車で移動してデモ会場にいくことができるようになっています。
搬入から動作確認まで30分程度で完了できます。
動画
Development of MIDI RT-Component for Musical Performances
ソフトウェアの仕組みと演奏の様子(英語)