こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
製作者のコメント
すでに応募している「手のひらサイズの倒立振子」につづいて第二弾です。先の作品はギアー付きDCモーターを使用していますが、今回はステッピングモーターを採用しています。ステッピングモータはバックラッシュが少なく、回転数の把握も容易なためより安定した倒立制御が可能です。おかげで豪快な走りが楽しめます。製作にあたって参考にしたサイトはjjrobots.comのBROBOTというものです。プログラム、3DCADデータ、回路図まで公開されています。あわせてこちらの文化展にも出品されているParadiseさんの「CNCの自作とCNCで作る工作」も大いに参考にさせていただきました。機体は3㎜厚のアクリル板を手加工で仕上げましたが、各パーツとの嵌合には0.1㎜代の精度が必要なのでCNCフライスがあればと思う製作過程でした。
製作者の情報
| 製作者 | : | kooky様 |
| ブログ | : | OLD MAKERS |
主に使用している加工機械や部品
- ハンドルーター、ドリル、ヤスリなどでの手加工(使用部品は回路図に掲載しております)
- KH42HM2-801
CADデータ
| データファイル | : | Download |
写真
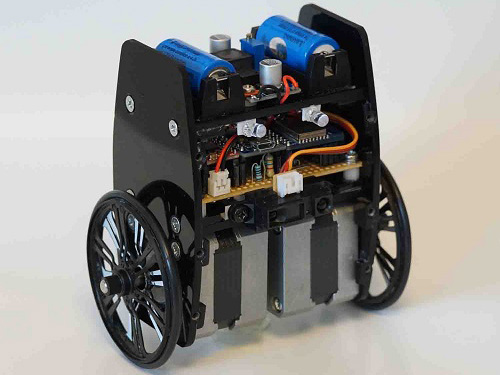
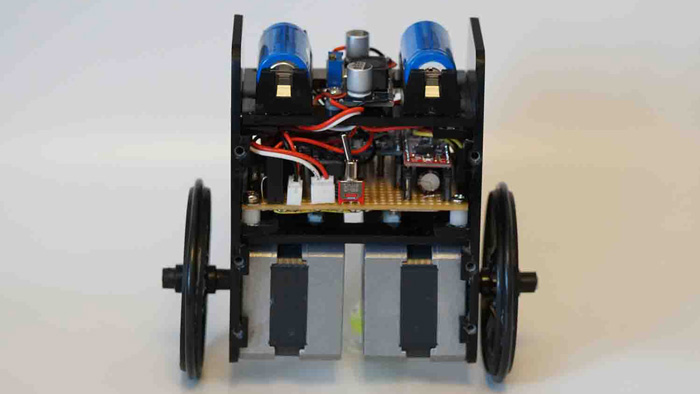
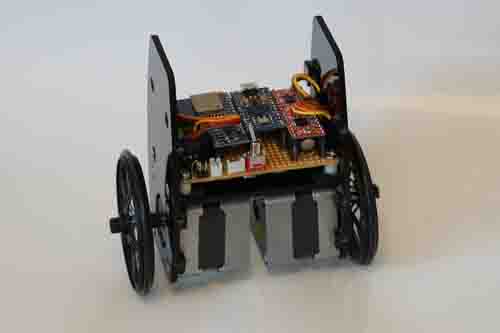
機体の外観です。最下段にステッピングモーター、中段にPC基板、上段には電源回路となっています。アクセサリーとしてヘッドランプ用LED2個、障害物検知用に距離センサーを搭載しています。
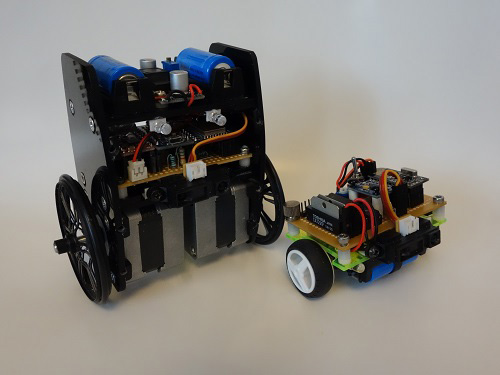
さきに応募した「手のひらサイズの倒立振子」との大きさ比較です。幅120㎜、高さ120㎜あります。
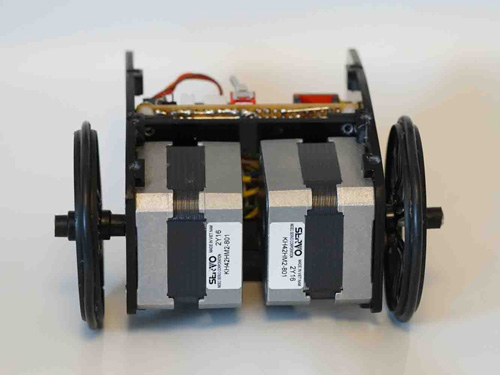
モーター部です。日本電産製のKH42HM2-801を使っています。
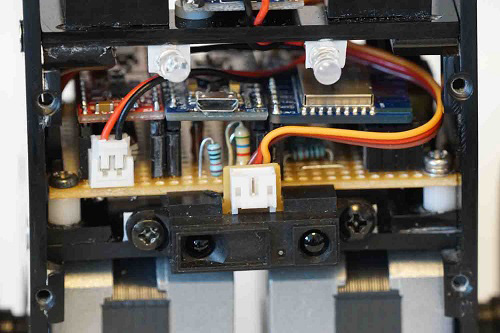
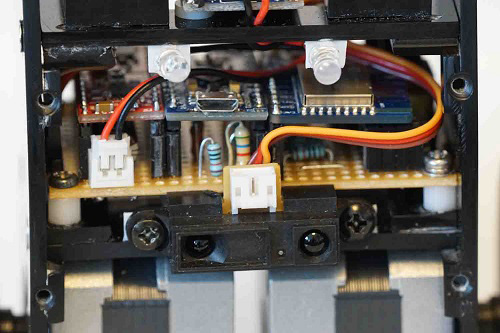
制御基板です。モータードライバー、マイコン(ProMicro)、WiFiモジュール、ジャイロセンサ(MPU6050)、5V,3.3 V電源回路を一枚の基板に搭載しています。
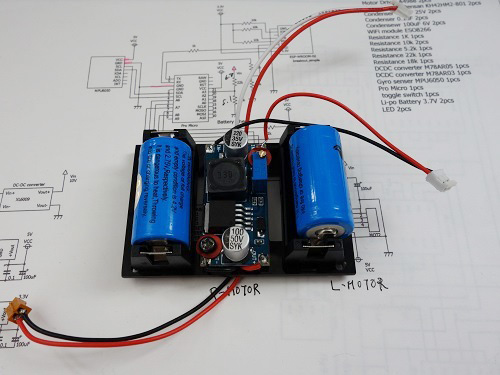
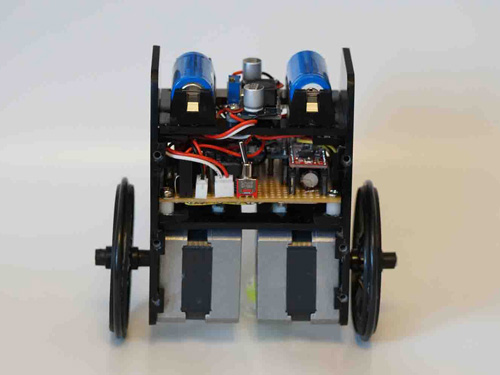
電池とDCDCコンバータです。電池はLiPo、CR123A(3.7V×2)、DCDCコンバータで昇圧してモーターへ8Vを供給しています。
回路図と使用部品です。

図面はCADで描きましたが加工は手加工で製作したサイドプレート。

サイドプレートにモーターを取り付け。

PC基板用プレートに基板用スペーサを接着、プレートにタップ孔を加工したのですが位置あわず、やむなくスペーサーを接着。

元来はドローン用の車輪だそうですが、4枚一組を入手し2枚づつ貼りあわせました。
LEDと距離センサーを取り付け。
電源部取付前。
完成しました。
動画
Balancing robot model6 test run
ダイナミックな動きを楽しんでください。ヘッドランプを兼ねたLEDはWiFiの動作確認としてWiFiから信号を受けた時に点滅するようにプログラムしています。距離センサーは一定距離以下になれば停止するようにプログラムしていますが、いまいち確実に作動しないようです。
Balancing robot model 6 with red cover
2号機にカバーを取り付けてみました。