こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
製作者のコメント
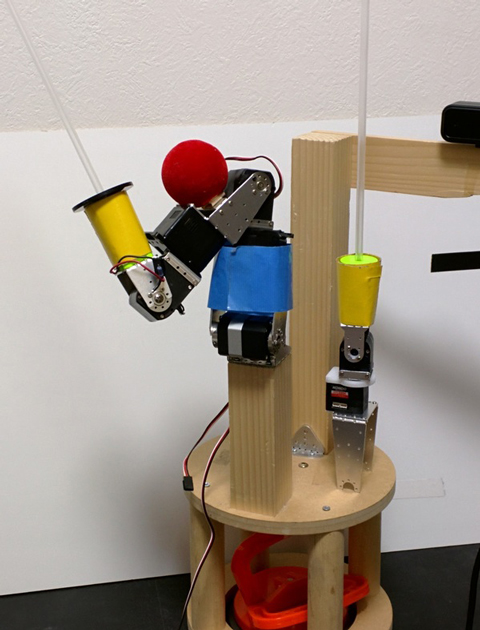
ロボットアーム剣道大会用の自動制御型5自由度アームロボットを製作しました。アルミ板金やPOM、ABSの部品をKitMillで製作しました。
センサーとしてUSB接続の深度画像センサーを使用し、PC上で画像認識により標的の位置を求め、そこへ「竹刀」を当てるための経路を計算することで自律的に試合を行います。PCから直にロボット用シリアルサーボモーターへ指令を送ることで動作します。
製作者の情報
| 製作者 | : | 山口辰久様 |
| Webページ | : | 山口自動機械 |
| ブログ | : | 山口自動機械 作業日誌 |
| : | @qzy13700 |
主に使用している加工機械や部品
写真
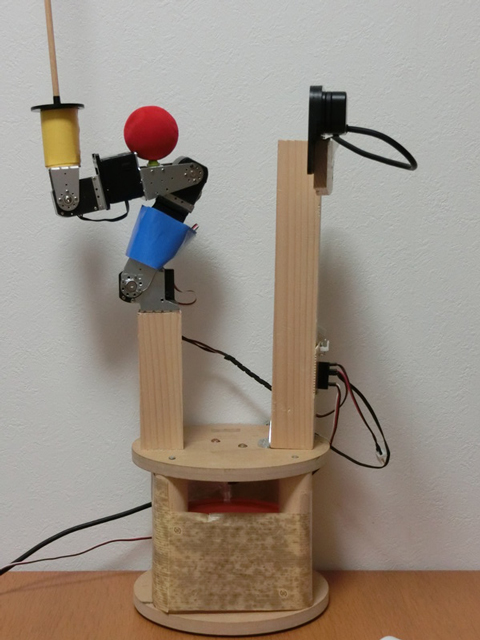
剣を構えたところを横から。

スマートフォンと大きさ比較。右上に張り出しているのが深度画像センサーです。カラーカメラにより色と画像上の位置を認識できるだけでなく、物体との距離や相手ロボットのフレーム等の障害物も同時に計測可能です。これを使って標的の位置を3次元的に捉えることができます。
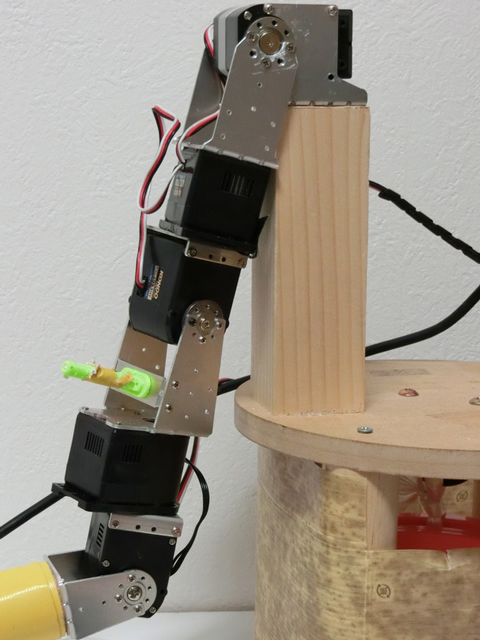
ホビー用二足歩行ロボットでも使われている、ロボット用シリアルサーボモーターを使用しました。それらをアルミ板金で固定し、つなぎ合わせることで全体を構成しています。
ロボットのハードウェアは2年前から引き続いて開発しています。去年まで既製品のアルミブラケットを多く使用していたのですが、今年はそのほとんどを自作アルミ板金部品に置き換えました。各関節の可動範囲を広げたり、打突動作を行いやすいようにリンクの長さを変える、等の改良を行いました。また、部品点数を増やすことなくコンパクトに収められたのではないかと思います。
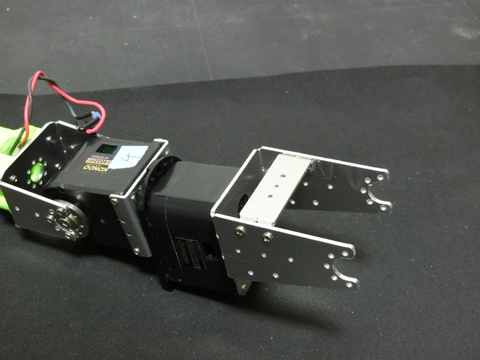
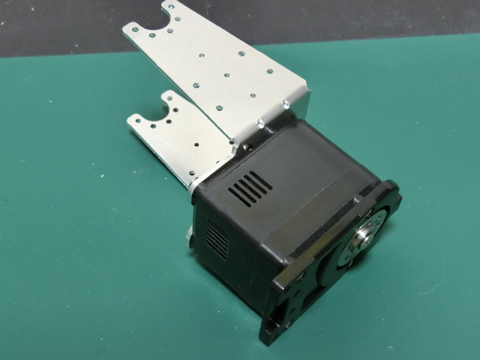
大会出場には間に合わなかったものの、異なる種類のサーボモーターを使って軽量化した別バージョンのアームも試作しました。

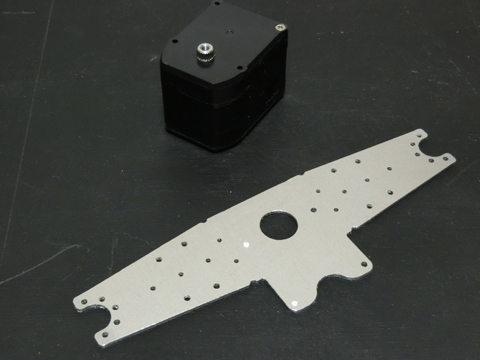

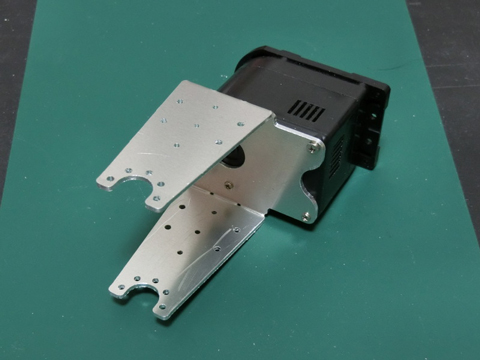

すべてのアルミ板金部品は、KitMill BT200で1.5mm厚のアルミ板を切削し、アルミ折り曲げ用の工具を使って手で曲げて作りました。
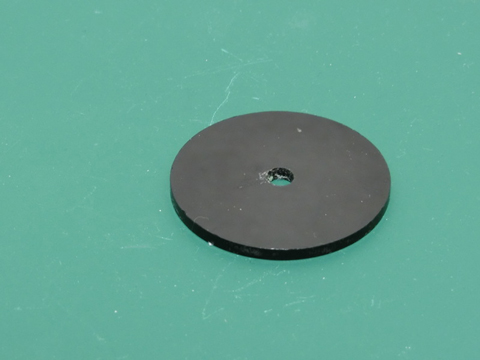

これは剣の「鍔(つば)」となる部品です。3mm厚のABS板から切削。



また、深度画像センサーをフレームに固定するためのカメラマウントを専用に作成しました。これは今年作成した、カメラ外形をはめ込むことで固定するタイプのマウントです。3mmのABS板を切削後、接着剤で接着して製作。

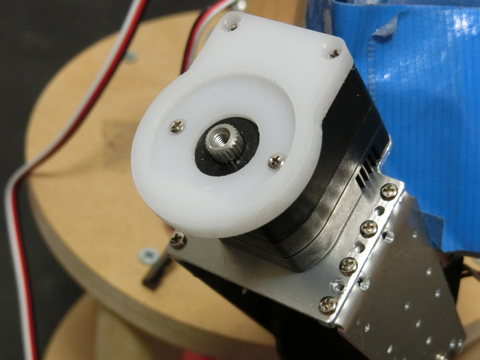
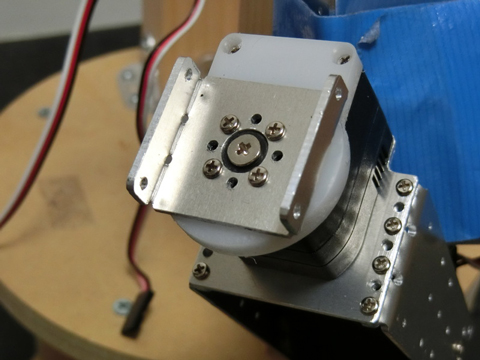
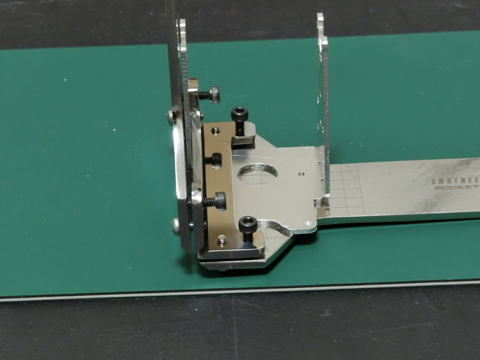
手首や肘の「ひねり」を実現する部分を作るため、サーボモーターの出力軸をそのままスラスト軸受けにしました。そのためのスペーサーをPOM板を切削して製作しました。この小型サーボモーターは、既製品パーツでこのようなスペーサーがなかったので自作することにしたものです。なお、これは軽量化のため試作していた別バージョンで、大会出場時のロボットには使用しませんでした。
動画
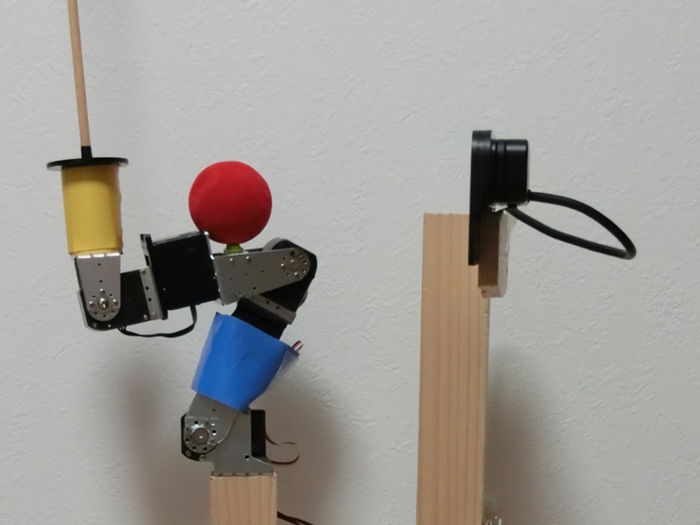
自動打撃動作のデモ。小手(黄色)、面(赤)、胴(青)の順に打てという指示だけを与え、竹刀の軌道はセンサー情報をもとに自動で生成しています。
教示再生により筆で字を書くデモ。(2014年8月)
予め人が手でロボットを持って動かした際の動作を記録し、そのまま再生することで動作を再現しています。今後は剣道競技と同様にセンサーの情報を使って紙を見つけたり、字形から動作を自動で生成できるようにしたいと考えています。