'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
linelive
製作者の情報
| 製作者 | : | 諏訪東京理科大学OB様 |
| Webページ | : | SUWA模型 |
使用している製品・部品
製作者のコメント
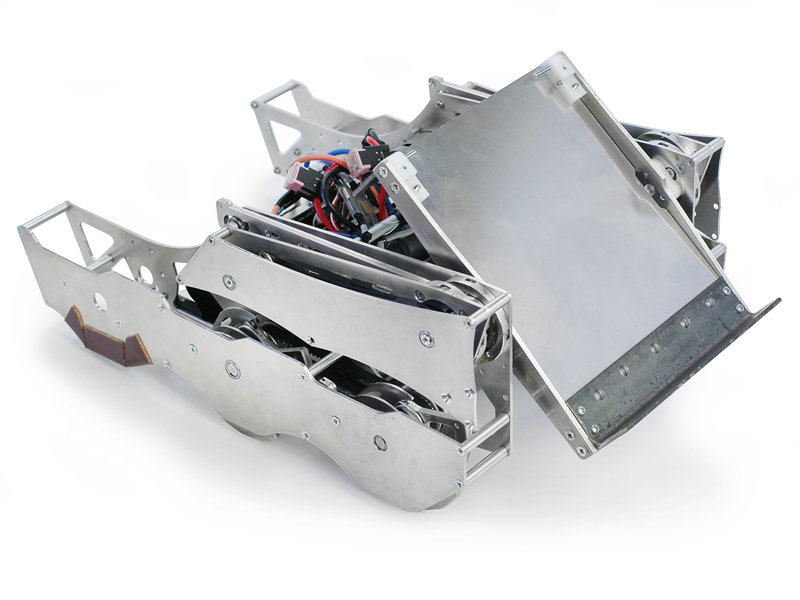
第20回かわさきロボット競技大会(2013/8/24~25)のために製作したロボットです。
大会ルールについて、詳しくはこちらをご参照ください。
ロボット先端の回転する部分、俗にいう回転アームで相手を上向きに弾いて転倒させます。
今年はアームに関するルールが変わったことで回転アームが作りにくくなったのですが、
去年製作した機体が魅力的だったので頑張ってルールにあわせた回転アームを製作しました。
写真
|
一番後ろの脚は書類の提出ミスと重量の関係で外しました。 一応戦えはしましたが、今回の残念ポイントです。 |
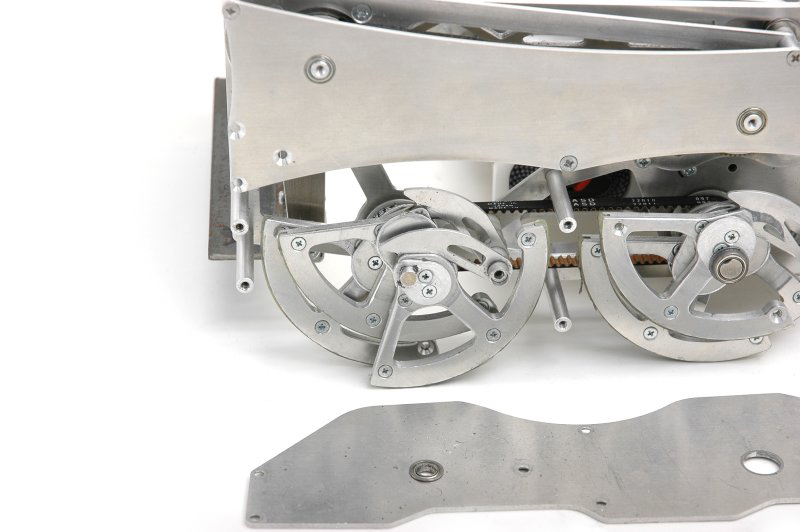 |
タイヤが使えないルールなので、リンク機構を用いた脚を使って進みます。 去年製作した脚機構よりもかなり効率が上がっていますが、各部品をネジだけで支えているため振動で緩みやすくなっています。 要改善です。 機構はこちらを参考にしました |
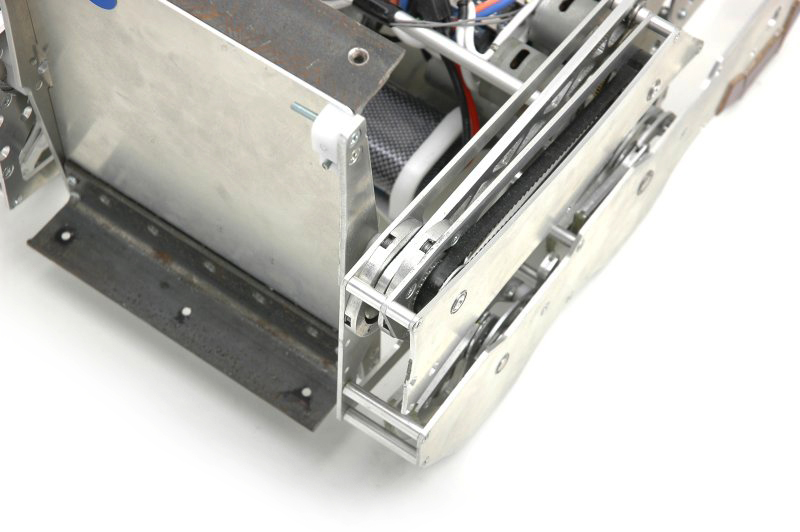 |
今回一番頭を使ったアームの機構部分です。 ルール上、アーム(攻撃部分)に一番近い動力伝達部分にリンク機構を搭載しなければいけません。 |
 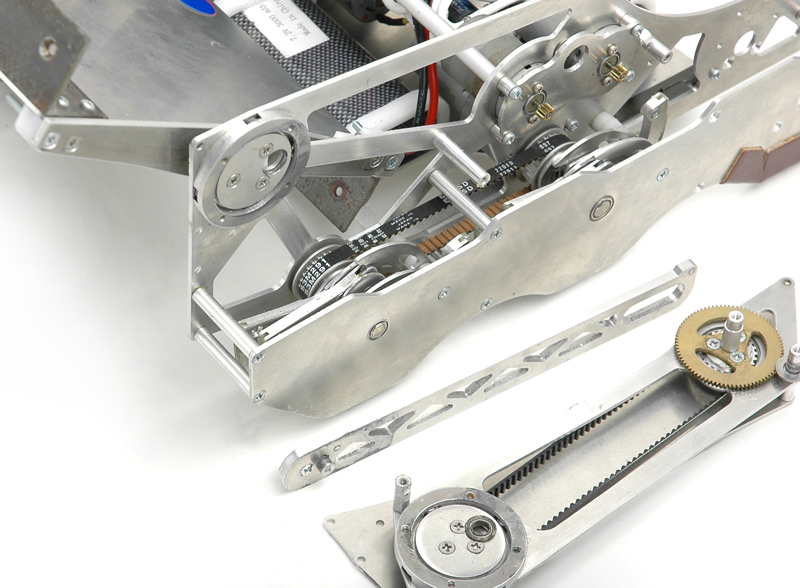 
|
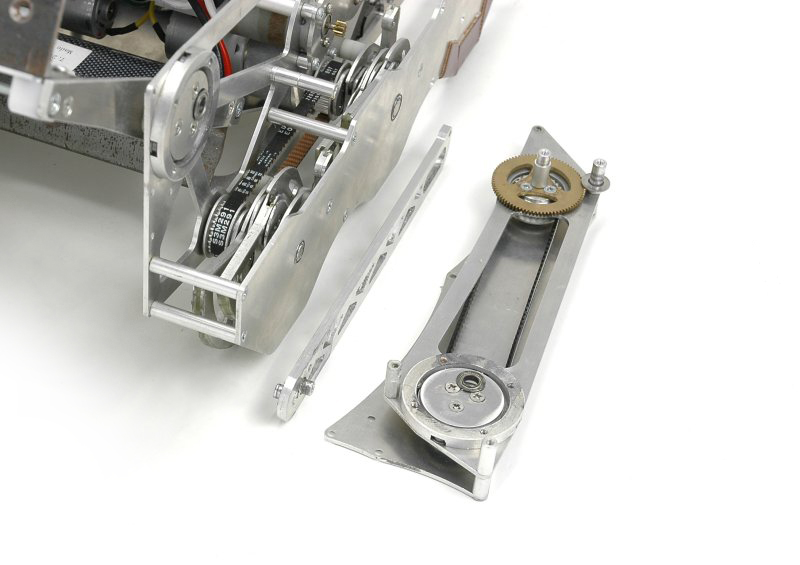
スライダーリンク機構を搭載しています。 ただリンク機構といえばリンク機構ですが、軸のずれているシャフトで入力と出力を繋いでいるだけです。 |
 |
アームの駆動部分にベアリング(MF63ZZ)を使用したら、負荷に耐えられずバラバラになってしまいました。 今度から力のかかるところにはオイレスを使おうと思います。 |
動画
なんとか決勝リーグまで進むことができました。