こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド

製作者のコメント
すでに応募している「手のひらサイズの倒立振子」、「倒立振子」につづいての第三弾です。豪快な走行性能を発揮した二号機の小型軽量化と、「美しい機械は性能も良い」が現役時代のモットーでもありましたのでデザインにも凝ってみました。本体製作にあたって参考にしたサイトはjjrobots.comのBROBOTというものです。プログラム、3DCADデータ、回路図まで公開されています。あわせてこちらの文化展にも出品されているParadiseさんの「CNCの自作とCNCで作る工作」も大いに参考にさせていただきました。
製作者の情報
| 製作者 | : | kooky様 |
| ブログ | : | OLD MAKERS |
主に使用している加工機械や部品
- 機体は3㎜厚のアクリル板をハンドルーター、ドリル、ヤスリなどでの手加工で仕上げました。
- モーター KH39FM2-022
- その他の使用部品は回路図に掲載しております
CADデータ
| データファイル | : | Download |
写真
構想図です。Designspark Mechanicalという3DCADソフトで描いています。電池ケースはモーターの両側に配置し背を低くします。機体は円筒型をイメージしています。
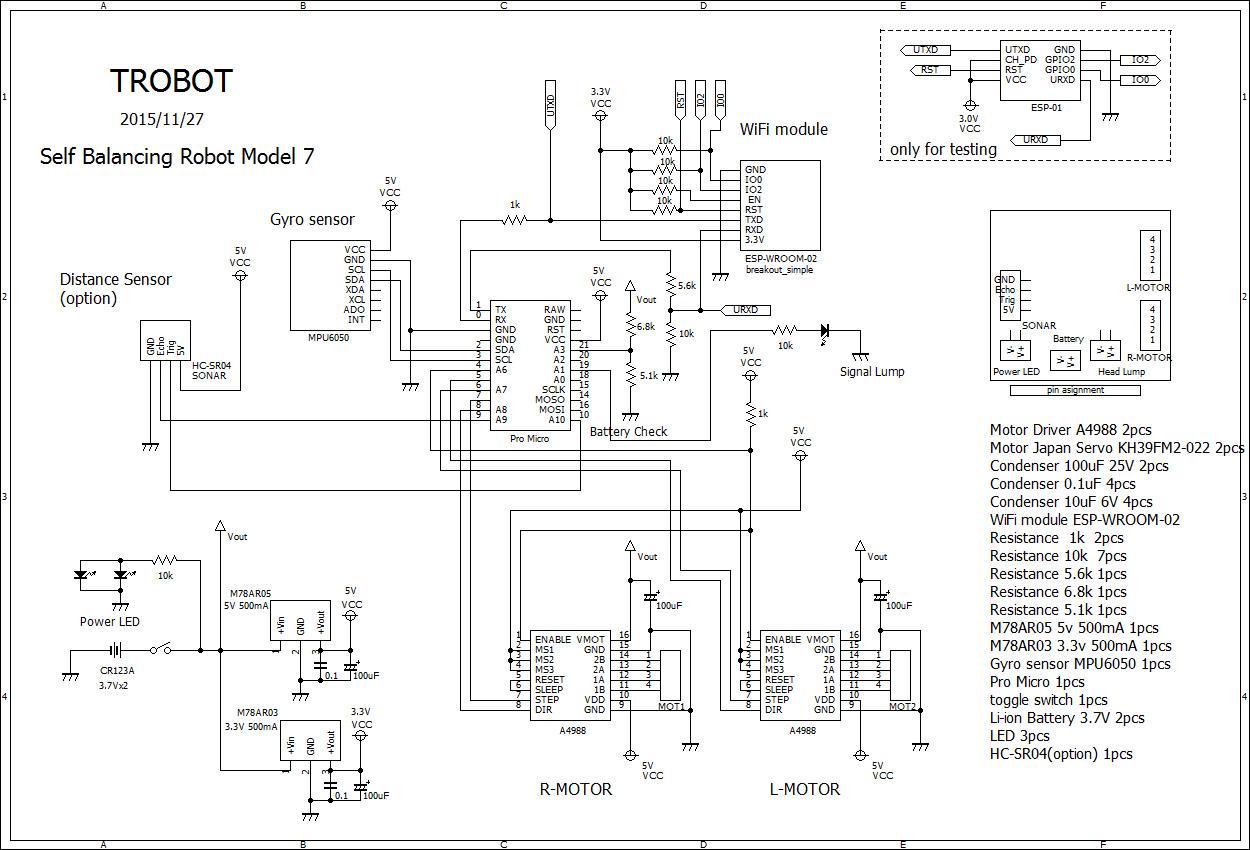
回路図です。二号機とほぼ同じですが、DCDC昇圧回路を省略しています。WiFiモジュールはESP-WROOM-02(技適あり)と実験のためにESP-01(技適なし)の両方が使えるようにしていますが技適なしのためあくまでも実験のみです。
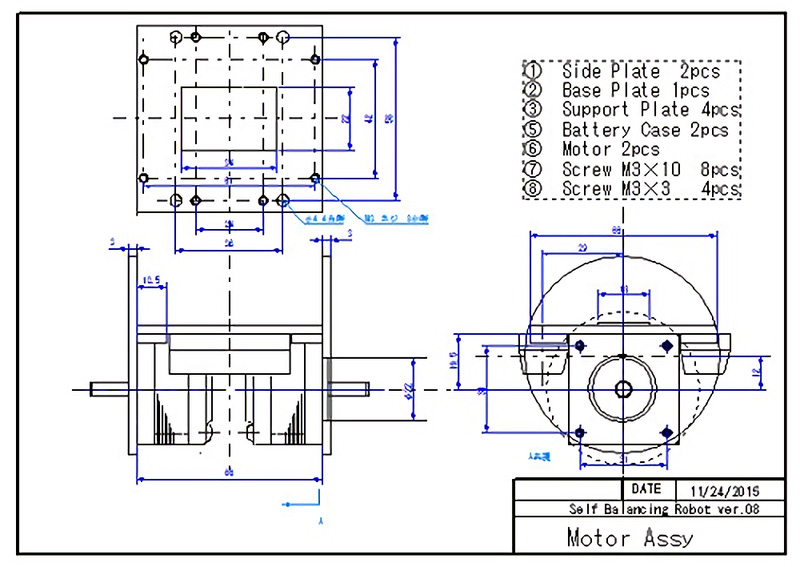
部品図は2DCADで部品図を描きます、ここまではハイテク模様ですが、ここからはローテクの加工作業です。CNCフライス欲しいのですが高値の花です。
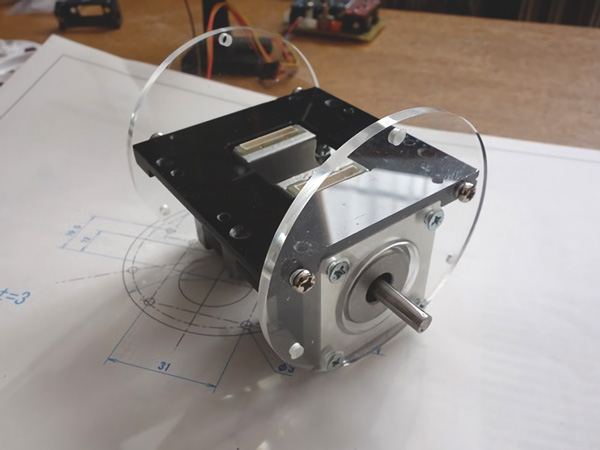
出来上がったモーター部です。ドリル孔は垂直に空けられないは、ルーターで削りすぎるはで今回は悪戦苦闘です。
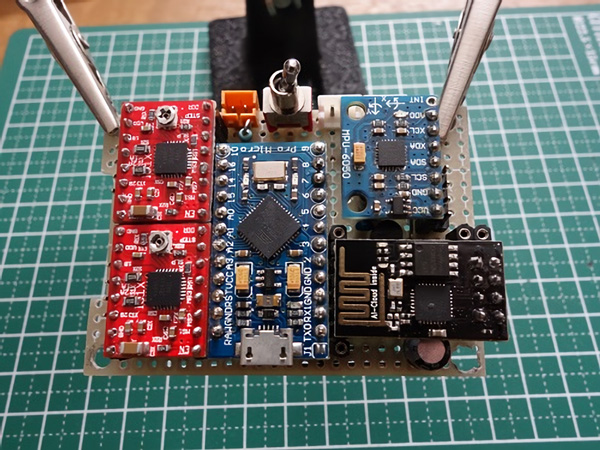
制御基板です。モータードライバー、マイコン(ProMicro)、WiFiモジュール、ジャイロセンサ(MPU6050)、5V,3.3 V電源回路とすべてを一枚の基板に搭載しています。
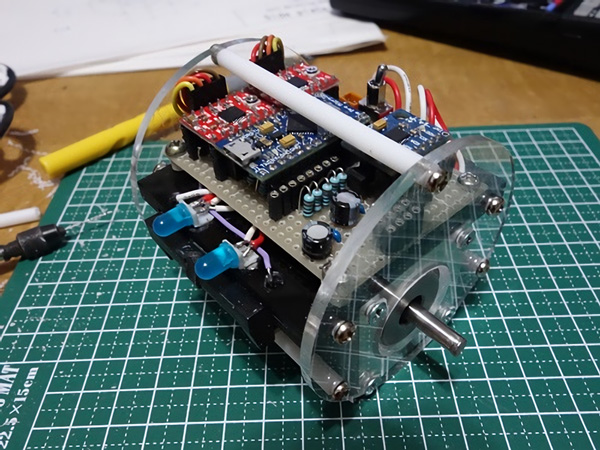
制御基板を組み込んで、補強バー3本を取り付けます。
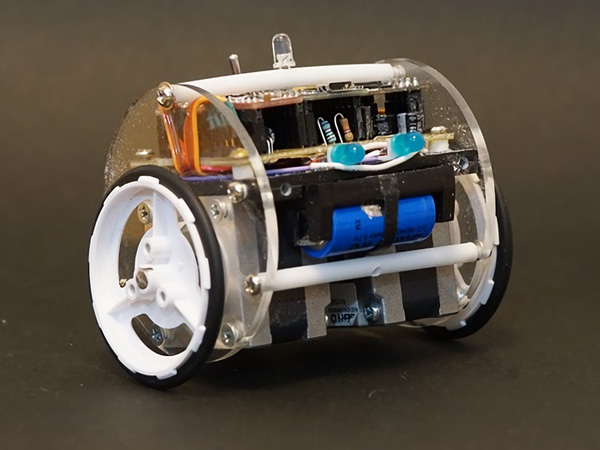
完成です。車輪はタミヤのナロータイヤセットの55㎜径を使いました。車軸径が3㎜なので5㎜までげてやらねばなりません。
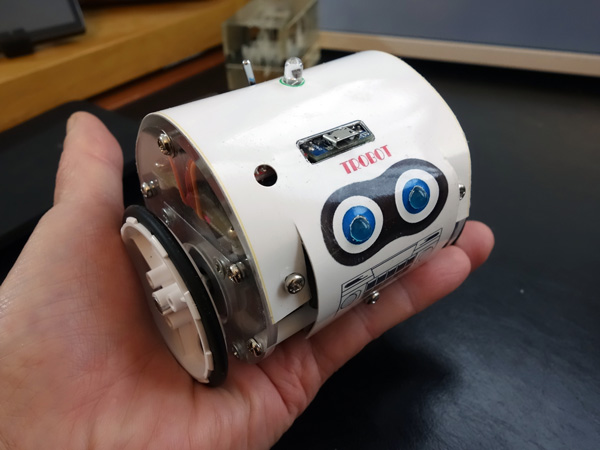
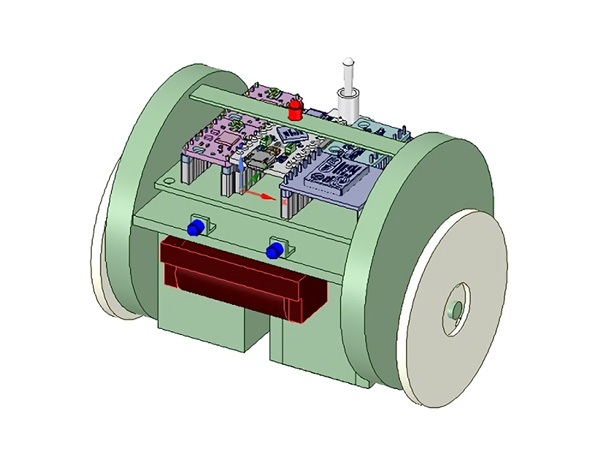
カバーを取り付けてみました。今回は凝ったかいあってなかなかのものと一人悦に入っております。photoshopでデザインし写真用紙にプリントアウトし、補強のためのクリアーファイルを裏張りしてクリアーラッカーで仕上げています。機体にぴったり合わせるために何度も型紙を作って位置合わせをしています。
動画
Self Balancing Robot Model7
二号機に比較して背が低く、低重心のため走行性能はすこぶる良好で思いのままに操縦できます。走り出す前に機体を傾ける様子はなかなか可愛いものです。