外形寸法

製品構成
ロボット本体

配線用ケーブル
その他、ご用意いただくものについてはこちらをご覧ください。
仕様
ストローク
ストローク
XYZ軸:160mm
Z軸最大積載重量(ヘッド部)
Z軸最大積載重量
(ヘッド部)
1.0kg
※スリープ電流0.3A時
最大送り速度
最大送り速度
XY軸:400mm/sec
Z軸:200mm/sec
分解能
分解能
XY軸:15.625μm
Z軸:3.90625μm
※マイクロステップ1/16時
リミットセンサー
リミットセンサー
XY軸:両側
Z軸:片側
※リミットセンサーセット装着時のみ使用可能
案内形式
案内形式
リニアガイド
送り形式
送り形式
XY軸:タイミングベルト
Z軸:多条ネジ - 樹脂ナット
電装部
電装部
ドライブ基板:TRIO、PLC中継基板
電源:AC100V50/60Hz
消費電力:60W
※モータードライバセット装着時のみ
重量
重量
15.2kg
ピンアサイン表
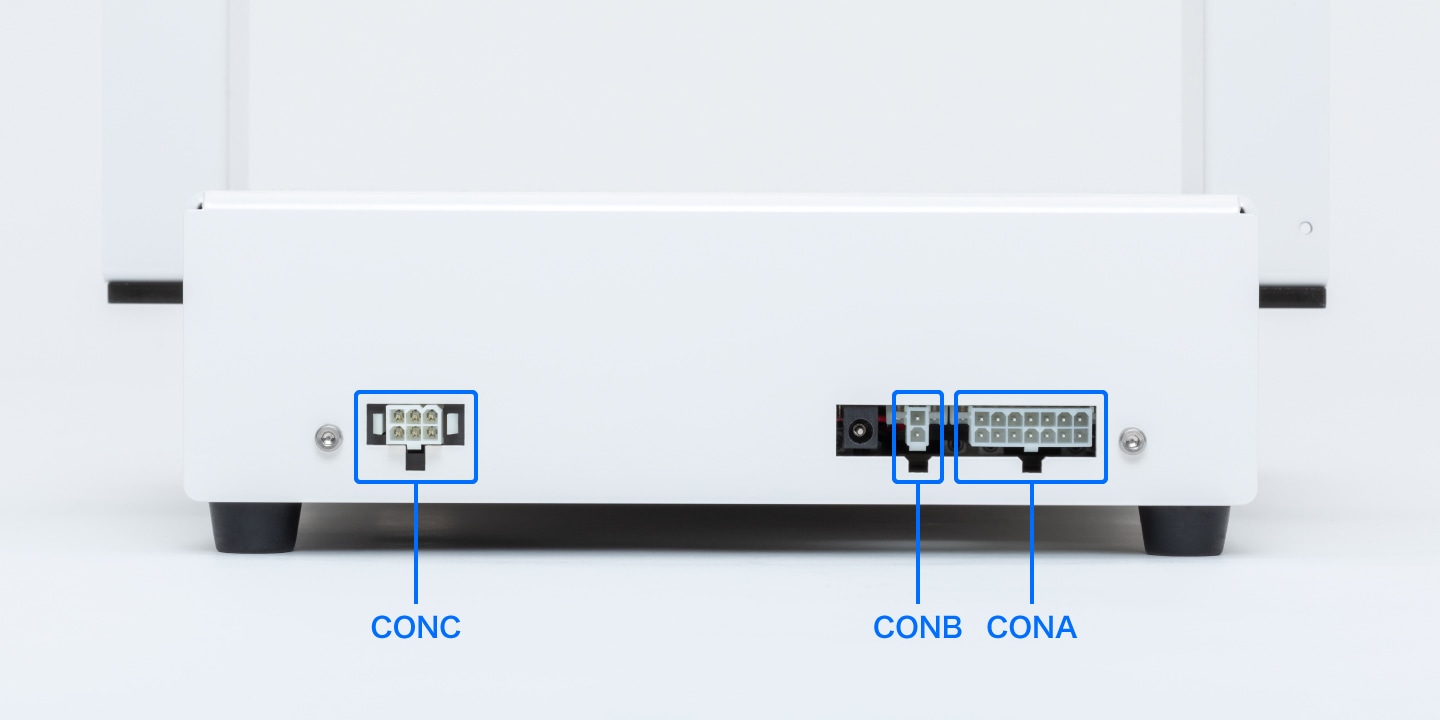
| CON番号 | 名称 | 割付表 | ||
|---|---|---|---|---|
| CONA ※1 | 制御用端子 | PIN | 機能 | 備考 |
| 1 | X-STEP | シンク出力(24V)に対応 ※2 | ||
| 2 | Y-STEP | |||
| 3 | Z-STEP | |||
| 4 | X-DIR | |||
| 5 | Y-DIR | |||
| 6 | Z-DIR | |||
| 7 | AUX | |||
| 8 | リミットセンサーX+ | リミットセンサーと直接接続 ※3 | ||
| 9 | リミットセンサーX- | |||
| 10 | リミットセンサーY+ | |||
| 11 | リミットセンサーY- | |||
| 12 | リミットセンサーZ+ | |||
| 13 | GND | |||
| 14 | ||||
| ※使用コネクタ:モレックス 5569-14 ※リミットセンサー:オムロン EE-SX97シリーズ(NPN出力) |
||||
| CONB ※1 | PLC用電源端子 | PIN | 機能 | 備考 |
| 1 | 24V | 接続PLCの消費電力8W以下のこと 8Wを超える場合は別途電源が必要 |
||
| 2 | GND | |||
| ※使用コネクタ:モレックス 5569-02 | ||||
| CONC ※4 | 制御用端子 | PIN | 機能 | |
| 1 | ユーザーにて割り当てます | |||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| ※使用コネクタ:モレックス 5559-6P | ||||
- モータードライバセット装着時のみ使用可能
- PIN7はTRIOのCON7を制御できます。本製品ではTRIOのCON7には4W以下のものを繋いでください。4Wを超えるものに関してはCONCをお使いください。
- リミットセンサーセット装着時のみ使用可能
- ツール用ケーブル装着時のみ使用可能
内部回路図
モータードライバセットではモータードライバに「TRIO」を使用しており、PLCで制御できるようにPLC中継基板を間に挟んであります。
PLCと「TRIO」を直接接続すると正常に動作しないため、PLCはPLC中継基板と接続するようにしてください。
ステッピングモーター
仕様
モーターサイズ:42mm角 × 48mm
ステップ角:1.8度
定格電圧:3.96V
定格電流:1.2A/相
巻線抵抗:3.3Ω
巻線方式:ユニポーラ型
※付属ステッピングモーター以外のモーターでの動作は想定しておりません。
結線表

| 相 | A | A COM | A | B | B COM | B |
| PIN | 4 | 5 | 6 | 3 | 2 | 1 |
製品の拡張性
■ Z軸への取り付け
Z軸には取り付け用のねじ穴(M3)が4個あります。ツールマウントなどの取り付けにお使いください。


■ ツールマウントへの取り付け
ツールマウントには取り付け用のねじ穴(M3)が25個あります。チャックなどの取り付けにお使いください。
※ツールマウントはオプション品です。(商品ページへ)


■ Y軸ベースへの取り付け
Y軸ベースには取り付け用のねじ穴(M4)が4個あります。ワークテーブルなどの取り付けにお使いください。

本製品は生産終了のため販売を終了いたしました。
■ 関連キーワード
XYZロボット / XYZステージ / 直交ロボット / 3軸ロボット / 卓上ロボット / メカトロニクス実習 / メカトロニクス教材 / FA教材 / FA教育 / ロボットキット / 産業用ロボット / 自作ロボット